Système bielle-manivelle
Le système bielle-manivelle est un assemblage mécanique qui tire son nom des deux pièces mécaniques qui le constituent : la bielle et la manivelle. Ce dispositif réalise la transformation du mouvement linéaire alternatif de l'extrémité de la bielle en un mouvement de rotation continu disponible sur la manivelle (vilebrequin), et vice-versa.
Apparu dans l’Empire romain (scierie de Hiérapolis), il constitue une innovation majeure complétant les cinq machines simples héritées des mécaniciens grecs. Sa cinématique, apparemment simple, cache une fonctionnalité technologique de première importance utilisée très couramment dans de nombreux mécanismes : moteur, pompe, scie, barrière automatique, etc.
Au XVIIIe siècle on l'utilise dans des dispositifs simples pour transformer l’énergie musculaire en mouvement rotatif (rouet). Au XIXe siècle apparait une nouvelle utilisation avec les machines à vapeur. Aujourd'hui, il reste la solution technique couramment mise en œuvre dans les moteurs à piston pour réaliser la variation cyclique de volume dans la chambre de combustion.
Histoire
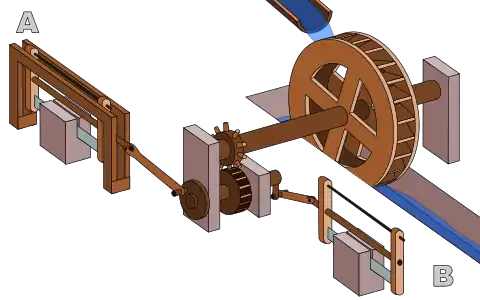
Les systèmes bielle-manivelle semblent connus par les Romains dès la fin du IIIe siècle. Ce mécanisme semble avoir été utilisé dans la scierie de Hiérapolis[1] - [2] - [3], ainsi que dans deux scieries du VIe siècle découvertes à Éphèse et Jerash. Il convertit le mouvement de rotation de la roue hydraulique en un mouvement linéaire entraînant les scies. Ces scieries sont les plus anciennes machines connues à associer une bielle à une manivelle[1] - [2] - [3].
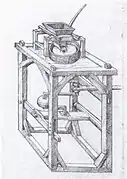
Les concepteurs de l'époque pour corriger les arrêts possibles sur les deux points morts qui peuvent bloquer le système, associent un volant d'inertie à l'axe de rotation. C'est un volant constitué d'une roue ou de barres en équerre munies de masses et qui régule la vitesse de rotation du système. Cette innovation est en fait l'ancêtre du régulateur à boules.
Le système bielle-manivelle est redécouvert au XVe siècle. Un manuscrit anonyme, daté d’approximativement 1430, dit Anonyme de la guerre hussite[4], contient plusieurs dessins de moulins à bras qui sont la première représentation figurée certaine de ce mécanisme : on y distingue parfaitement les bielles manœuvrées à bras, et les manivelles.
À la fin du Moyen Âge, le système bielle-manivelle constitue les prémisses d’un nouveau machinisme, d’abord de petite taille avec les machines à pédales qui libèrent la main de l’ouvrier, comme le tour, la meule ou le rouet (1470). L’interdiction de ce dernier, longtemps inscrite dans les règlements de corporations[4], montre combien cette innovation est pertinente parce que déstabilisante du point de vue de l'organisation du travail. Viennent ensuite des machines de plus grande taille, actionnées par les roues des moulins, comme la scie hydraulique (Francesco di Giorgio Martini), la pompe aspirante et foulante (XVIe siècle) ou le marteau hydraulique (martinet) qui permet de forger des pièces de grandes dimensions.
Au XIXe siècle apparait une nouvelle utilisation avec les machines à vapeur et son essor sera fulgurant à travers le monde.
- Différentes utilisations
 Moulin à bras.
Moulin à bras. Rouet à pédale.
Rouet à pédale. Machines à couper et à polir le verre.
Machines à couper et à polir le verre.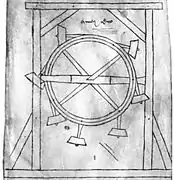
 Moulin à grains (après 1480).
Moulin à grains (après 1480).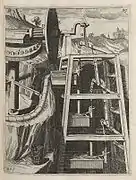 Pompe hydraulique (1661)
Pompe hydraulique (1661) Le rémouleur (1840) Alexandre-Gabriel Decamps.
Le rémouleur (1840) Alexandre-Gabriel Decamps.
Exemples d'applications
Quelques exemples de systèmes :
- les moteurs à piston (la manivelle est alors réceptrice) : la source d'énergie vient de l'explosion des gaz introduits dans la chambre et poussant le piston ;
- les pompes hydrostatiques (la manivelle est alors motrice) : un couple moteur appliqué à la manivelle anime l'ensemble, le piston propulse alors le fluide contenu dans la chambre ;
- les mécanismes d'ouverture de certaines barrières automatiques (en) (péages ou parking) : l'intérêt du dispositif réside dans le fait que le moteur animant le mécanisme tourne dans le même sens pour la levée ou la descente de la lisse, à l'instar des mécanismes d’essuie-glace. La manivelle effectue exactement un demi-tour pour chaque mouvement ;
- les automates ludiques des vitrines décorées des grands magasins : toutes les pièces animées d'un mouvement alternatif sont entraînées par des moteurs électriques tournant en continu ; simplicité et effet garanti.
- Différents exemples d'utilisation
 Embiellage multiple de locomotive à vapeur
Embiellage multiple de locomotive à vapeur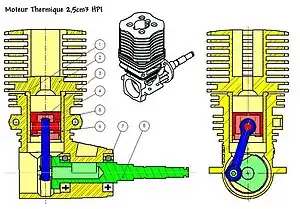 Moteur thermique à piston.
Moteur thermique à piston.
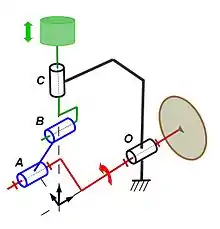
Piston(rouge), bielle(bleu) et vilebrequin (vert).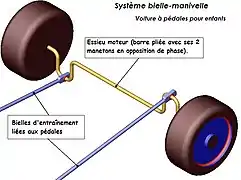 Entrainement de voiture d'enfant.
Entrainement de voiture d'enfant.
Manivelle (jaune) et biellettes en (bleu) Pédalier sur machine à coudre.
Pédalier sur machine à coudre.
Description et terminologie
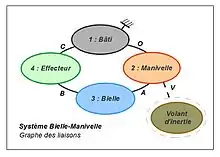
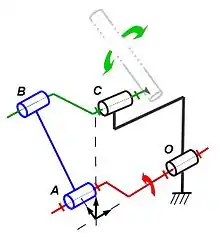
Le système bielle-manivelle permet la transformation du mouvement linéaire de l'extrémité de la bielle en un mouvement de rotation continu disponible sur la manivelle (vilebrequin), et réciproquement. Il est constitué de 4 pièces principales :
- le bâti (1).
- la manivelle (2), appelée aussi vilebrequin sur les moteurs,
- la bielle (3),
- L'effecteur (4) : piston, levier, pédale suivant les cas,
Le système est très généralement complété par un volant d'inertie stabilisant la vitesse de rotation de la manivelle.
La manivelle et l'effecteur constituent les deux pièces d'entrée-sortie du mécanisme.
- La manivelle est dite motrice, quand elle entraine le système - elle fournit l'énergie au système : cas du rouet, de la scie sauteuse, de la pompe hydraulique, etc.
- La manivelle est dite réceptrice, quand elle est entrainée par le système - elle reçoit l'énergie du système : cas du moteur à piston.
La manivelle (motrice ou réceptrice) est animée d'un mouvement de rotation continue, alors que l'effecteur est animé d'un mouvement linéaire alternatif, rectiligne ou pas. La bielle est munie de deux articulations, d'un côté à la manivelle, et de l'autre à l'effecteur. Suivant le type de liaison imposé à l'effecteur, le système réalise les conversions de mouvement suivantes :
Rotation continue mouvement rectiligne alternatif.

C'est le cas où l'extrémité de bielle est fixée à un piston mobile dans un cylindre ou plus généralement à une liaison glissière. L'extrémité de bielle décrit un segment de droite. Exemples :
- sens moteur : moteur thermique, machine à vapeur.
- sens récepteur : pompe hydrostatique, compresseur, machine à scier, machine à coudre (mouvement de l'aiguille), machine à perforer.
Rotation continue rotation alternative.
C'est le cas où l'extrémité de bielle est liée à une autre manivelle, une pédale ou un bras articulé. L'extrémité de bielle décrit un segment de courbe circulaire. Exemples :
- sens moteur : dispositif à pédale, voiture d'enfant, machine à coudre (entrainement), rouet.
- sens récepteur : pompe rotative alternative, essuie-glace, barrière automatique, griffe d'entrainement.
et plus généralement tout mécanisme à quatre barres
Modélisation cinématique
Moteur à piston
Transformation rotation en translation
Barrière automatique
Transformation rotation en rotation
Le mécanisme bielle-manivelle comporte un nombre cyclomatique égal à 1, et présente une mobilité utile. Le tableau ci-dessous répertorie les principales solutions cinématiques en indiquant le type de chaque liaison mécanique, les degrés d'hyperstatisme et de mobilité.
| Exemple | Liaison O 1/2 | Liaison A 2/3 | Liaison B 3/4 | Liaison C 4/1 | Mobilité Mc | Hyperstatisme
-Ms |
|---|---|---|---|---|---|---|
| Trans formation : rotation continue mouvement rectiligne alternatif. | ||||||
| Moteur pompe classique | Pivot (5) | Pivot (5) | Pivot glissant (4) | Pivot glissant (4) | 1 | 1 |
| Piston de section oblongue | Pivot (5) | Pivot (5) | Pivot glissant (4) | Glissière (5) | 1 | 2 |
| Machine vapeur (bielles très longues) |
Pivot (5) | Pivot (5) | Pivot (5) | Pivot glissant (4) | 1 | 2 |
| Piston de forme ovalisée ou jeu | Pivot (5) | Pivot (5) | Pivot glissant (4) | Linéaire annulaire (3) | 1 | 0 |
| autre combinaison admissible | Pivot (5) | Pivot glissant (4) | Rotule(3) | Pivot glissant(3) | 2 | 0 |
| Transformation : rotation continue Rotation alternative. | ||||||
| Barrière automatique Essuie glace |
Pivot (5) | Pivot (5) | Pivot glissant(4) | Pivot (5) | 1 | 2 |
| Pédalier d'entrainement | Pivot (5) | rotule (3) | rotule (3) | Pivot (5) | 2 | 0 |
{*} La liaison éventuelle avec le volant d'inertie, s'il est présent, est une liaison encastrement.
Équations horaires
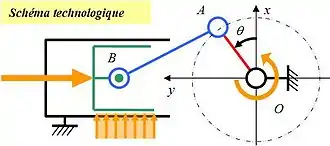
On considère ici que le système bielle-manivelle est dans la configuration où la liaison de l'extrémité de la bielle est une liaison glissière (cas des moteurs et pompes) ; que le mécanisme est un mécanisme plan et que l'axe du piston croise l'axe de la manivelle (axes concourant). La géométrie, suivant le schéma ci-contre, est décrite par :
- le rayon R = OA de la manivelle,
- la longueur L = AB de la bielle,
- la distance entre le point O et la droite de déplacement du point B,
- l'angle θ de rotation.
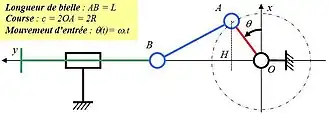
Dans notre configuration le point B est sur l'axe (O, y).
On repère la position du mécanisme par la position angulaire de la manivelle.
Vilebrequin tournant, l'angle est fonction du temps.
En écrivant la longueur du segment h(t) = OB, il vient (voir calcul détaillé au § cinématique) :


avec dans le cas d'une rotation à vitesse constante.
Par dérivation, on obtient la vitesse puis l'accélération (voir en § cinématique).

La position angulaire de la manivelle θ en fonction de la position du piston (OB) se détermine avec la formule réciproque :

- Course, vitesse et accélération du piston
 Course du piston en fonction de θ.
Course du piston en fonction de θ. Vitesse du piston en fonction de θ.
Vitesse du piston en fonction de θ.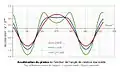 Accélération du piston en fonction de θ.
Accélération du piston en fonction de θ.
- Considérations géométriques
- Pour que le système puisse exécuter un tour, il faut que la bielle soit plus longue que la manivelle (la fonction arcsin n'acceptant pas d'argument supérieur à 1) ;
- Le milieu de course du piston ne correspond pas exactement à θ = 0.
- Points morts
Il existe deux points où la vitesse s'annule pour changer de signe :
- θ = 90° : OB = R + L : correspond à la position la plus haute de B, appelée point mort haut,
- θ = 270° : OB = L - R : par opposition, correspond au point mort bas.
- Course
La distance séparant les deux points morts et valant 2R est appelée course du piston. Pour un système bielle-manivelle avec piston dans l'axe :
- La course du piston vaut deux fois le rayon (R).
- La longueur (L) de bielle n'a pas d'incidence sur la course.
- Lois du mouvement
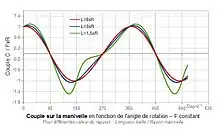
- les courbes ci-contre obtenues à partir de l'équation horaire, donnent la course, la vitesse et l'accélération du système bielle-manivelle pour différents rapports longueur de bille / rayon de la manivelle. On constate suivant les cas
- Bielle longue (L = 8R) : course, vitesse et accélération sont des fonctions quasi sinusoïdales. Cette configuration est exploitée sur les anciennes machines à vapeur.
- Bielle moyenne (L = 3R) (rapport proche des valeurs en usage dans les moteurs à explosion) : course et vitesse restent des fonctions quasi sinusoïdales, mais la décélération après le point mort haut est brusque, ce qui optimise la propagation du front de flamme. Autour du point mort bas, sur presque une demi-période, l'accélération est constante, ce qui favorise le remplissage et l'évacuation des gaz[5].
- Bielle courte (L = 1,5 x R) : le point mort haut est bref alors que le point mort bas dure beaucoup plus longtemps. Cette configuration est propice au moteur bas régime et au compresseur[5].
Quelques exemples de valeurs conventionnelles dans le cas des moteurs thermiques :
- moteur de cyclomoteur 50 cm3 : R = 20 et L = 80 = 4R (mm) ;
- moteur de modélisme 6 cm3 : R = 10 et L = 35 = 3,5R.
Comportement statique
L'étude statique du mécanisme permet de déterminer la relation liant l'effort appliqué au piston et le couple exercé/disponible sur la manivelle. On considère le mécanisme en équilibre sous l'effet de l'ensemble des efforts extérieurs et on néglige les forces d'inertie (cas particulier d'un système à l’arrêt). C'est le principe de calcul adopté par les logiciels élémentaires de simulation mécanique, qui donnent l'évolution des efforts et du couple en fonction des positions angulaires.
Méthode statique
Dans cette étude, on adopte les conventions suivantes :
- Force extérieure appliquée sur et suivant la direction de l'axe du piston. L'intensité de est supposée connue ;
- Couple appliquée à la manivelle ( colinéaire à l'axe de la manivelle).



Le problème statique peut être résolu à l'aide de torseurs mais la symétrie du système permet une résolution graphique. On isole successivement la bielle, le piston et la manivelle et on applique les lois d'équilibre mécaniques :

- l'équilibre de la bielle montre que les actions et transmises en A et B ont une direction colinéaire à la direction principale de la bielle, leurs sens opposés et ont même intensité ;
- l'équilibre du piston sous les 3 actions () permet de donner la relation entre l'intensité de l'action au point B : et ;
- l'équilibre de la manivelle sous 3 actions (2 articulations et un couple) donne finalement la valeur du couple en fonction de .






L'étude est menée de la même manière en inversant simplement les deux dernières étapes.

Méthode énergétique
En considérant que le système est de rendement 1, que la manivelle tourne à vitesse constante, et que les inerties sont négligeables, on établit une relation simplifiée donnant en fonction de , à partir de l'égalité des puissances consommée et fournie () :


Analyse :
- Lorsque L est suffisamment grand, le deuxième terme devient négligeable et la fonction est quasi périodique.
- Les maximums ont lieu aux environs des positions 180° et 360° mais pas exactement. Le décalage est d'autant plus grand que la bielle est courte.
- Quelle que soit la longueur de la bielle, nous avons un couple nul aux points morts haut et bas. Ici, l'action de F est sans effet sur la rotation (de même sur un pédalier de vélo l'action de la jambe n'a pas d'effet lorsque la pédale est à la verticale de l'axe). En pratique, on compense ce défaut par un volant d'inertie.
Cinématique
Considérons :
- le rayon de la manivelle ,
- la longueur de la bielle ,
- la distance entre le point O et la droite de déplacement du point B,
- l'angle de rotation dans le cas d'une rotation à vitesse constante..
- Le rapport bielle/rayon manivelle





Nous pouvons écrire les relations géométriques :
- (1) (2) (3)



Le théorème de Pythagore donne : soit (4)


Nous devons distinguer deux cas : l'axe du piston peut-être concourant avec l'axe de manivelle, ou pas.
Cas d'axes concourants
En remplaçant avec (2) et (3) dans (4), il vient :
d'où


Cas d'axes non concourants
Notons le décalage entre les axes et définissons tel que :



Les relations écrites plus haut restent inchangées à l’exception de (2) qui devient :

En remplaçant (2) dans (4) nous obtenons :

Vitesse
La vitesse en fonction de s'obtient en dérivant la relation obtenue plus haut :

La vitesse en fonction du temps avec


Accélération

Accélération en fonction du temps :

Relation entre couple et force
L'égalité des puissances consommée et fournie s'écrit . En remplaçant dans l'équation en haut, il vient :


D'où :

Si notre système tourne dans le sens horaire (contrairement au schéma)

et :

Notes et références
- [PDF] (de) Klaus Grewe (dir.), « Die Reliefdarstellung einer antiken Steinsägemaschine aus Hierapolis in Phrygien und ihre Bedeutung für die Technikgeschichte. Internationale Konferenz 13.−16. Juni 2007 in Istanbul », Bautechnik im antiken und vorantiken Kleinasien, Istanbul, Ege Yayınları/Zero Prod. Ltd., byzas, vol. 9, , p. 429–454 (429) (ISBN 978-975-807-223-1, lire en ligne)
- (en) Tullia Ritti, Klaus Grewe et Paul Kessener, « A Relief of a Water-powered Stone Saw Mill on a Sarcophagus at Hierapolis and its Implications », Journal of Roman Archaeology, vol. 20, , p. 138–163 (161)
- (es) Klaus Grewe (trad. Miguel Ordóñez), « La máquina romana de serrar piedras. La representación en bajorrelieve de una sierra de piedras de la antigüedad, en Hierápolis de Frigia y su relevancia para la historia técnica », Las técnicas y las construcciones de la Ingeniería Romana, v Congreso de las Obras, , p. 381–401 (lire en ligne)
- Bertrand Gille, Les ingénieurs de la Renaissance : Thèse Histoire, Paris, Seuil, coll. « Points Sciences », 1960, 1978, 282 p. (ISBN 978-2-02-004913-9 et 2-02-004913-9)
- « Il ne modifie pas la cinématique du piston », sur mce-5.com/ (consulté le )
Voir aussi
Articles connexes
Liens externes
- Piston motion equations (en)
- Animation du mouvement de la bielle de Bérard