Machine simple
On appelle machine simple un dispositif mécanique élémentaire permettant de transformer une force de module et de direction déterminés en une force dont le module ou la direction sont différents[2].
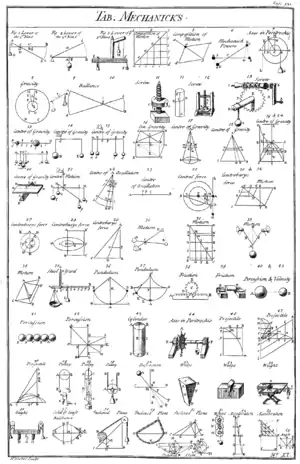
Selon les Anciens, il y a cinq machines simples : le levier, la poulie, le coin, le treuil et la vis sans fin. Au Livre II de ses Mécaniques, Héron d'Alexandrie a étudié chacune d'elles. La Renaissance identifie une sixième : le plan incliné.
Généralement, les machines simples sont classées en six à huit types :
Le nombre varie selon qu'on distingue l'engrenage de la vis et la roue du treuil.
Avec la révolution industrielle, et les progrès de la mécanique théorique, la notion perd de son importance.
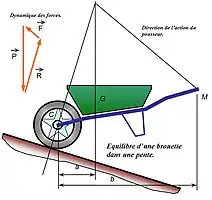
Franz Reuleaux démontre que, fondamentalement, un levier, un treuil ou une poulie sont un seul et même dispositif mécanique (un corps en rotation autour d'un axe, subissant trois forces), de même que le coin, le plan incliné et la vis (un bloc glissant le long d'une surface). La mécanique adopte un point de vue où une machine n'est plus une combinaison de « machines simples », mais une combinaison de forces agissant sur des points reliés, qu'elle peut étudier directement (à l'aide de vecteurs, moments, etc.) sans l’intermédiaire de ces machines simples. De plus, à cette époque, la mécanique ne se limite plus à la mécanique du solide : des dispositifs pneumatiques, hydrauliques, électriques, etc. s'ajoutent à la palette des possibilités, tandis que le solide n'est plus indéformable; il se fait élastique, ressort, etc.
Voir aussi
Notes et références
- Ephraim Chambers, Cyclopaedia, A Useful Dictionary of Arts and Sciences, Vol. 2, 1728, Londres, p. 528, Plate 11.
- (en) Akshoy Paul et Pijush Roy, Sanchayan Mukherjee, Mechanical Sciences : Engineering Mechanics and Strength of Materials, New Delhi, Prentice Hall of India, , 596 p. (ISBN 978-81-203-2611-8, OCLC 166755089, lire en ligne), p. 215