Résistance au roulement
La résistance au roulement (ou traînée de roulement) est le phénomène physique qui s'oppose au roulement. En tant qu'opposition au mouvement, il s'apparente aux frottements, mais est de nature différente : il est dû à la déformation élastique des pièces en contact. Il est donc en cela différent de la résistance au pivotement d'un palier lisse, et de la résistance au glissement.
Il faut distinguer la résistance au mouvement global d'un système (par exemple d'un véhicule) par rapport à un référentiel (en général le sol), et le mouvement relatif de deux pièces. Ainsi, l'adhérence et le frottement peuvent constituer une opposition au mouvement global du système (notamment le frottement de l'air), mais peuvent aussi servir à créer ce mouvement (entraînement par friction).
Dans le cas d'un véhicule sur pneu (du vélo au métro parisien en passant par la moto, la voiture et le camion), c'est l'adhérence de la roue sur le sol qui permet de tracter ou propulser le véhicule (de le faire avancer), de le freiner, et pour les systèmes qui ne sont pas guidés, de maîtriser sa trajectoire (absence de dérapage). Lors d'une accélération positive (vers l'avant), on a donc d'une part la résistance au glissement (l'adhérence) qui met le véhicule en mouvement, en empêchant un mouvement relatif de la roue par rapport au sol (dérapage) ; et d'autre part la résistance au roulement (écrasement du pneu par le poids du véhicule) qui s'oppose au mouvement.
Phénoménologie
La notion de roulement implique le contact de deux pièces dont l'une au moins présente une courbure ; on a typiquement :
- un cylindre sur un plan : cas d'une roue ou d'une butée à aiguilles ;
- une sphère sur un plan : butée à billes ;
- un tore sur un plan : galet sur rail linéaire ;
- une sphère sur un tore : roulement à billes ;
- un cylindre sur un cylindre : roulement à aiguilles, galet d'entraînement ;
- un tore « creux » sur un cylindre : roue métallique sur rail, poulie sur câble ;
- un ellipsoïde sur un tore : roulement à deux rangées de rouleaux ;
- ou un cône sur un cône : roulement à rouleaux coniques.
Pour que deux pièces restent en contact l'une avec l'autre, il faut un effort presseur. En étant pressées l'une sur l'autre, les pièces se déforment : la pièce courbe s'aplatit, la pièce plane (ou la moins courbée) se creuse et forme un bourrelet de matière.
Cas d'une roue libre
Dans un premier temps, on considère le roulement d'un cylindre sur un plan, et on sépare les deux phénomènes de déformation. Sauf mention contraire, on se place en statique : l'élément roulant est immobile par rapport à la piste de roulement, ou bien à la limite du roulement. On se limite à la présence de trois forces sur le cylindre (effort presseur, effort moteur, action du support) pour pouvoir déterminer de manière simple l'action du support (principe des forces coplanaires concourantes). C'est le cas d'une roue libre (non motrice et non freinée) : l'effort presseur et l'effort moteur sont transmis par l'axe, par exemple :
- roue avant d'un vélo ;
- roues arrière d'une voiture de type traction, roues avant d'une voiture de type propulsion ;
- roues d'une remorque, d'un chariot ;
- billes d'un roulement à billes.
Aplatissement d'un cylindre
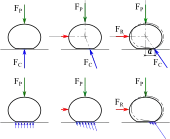
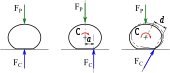
Soit un cylindre aplati sous l'effet d'un effort presseur et soumis à un effort moteur (force parallèle au plan, en rouge sur l'image ci-contre). Faire tourner le cylindre revient à le renverser ; il faut donc fournir une force suffisante, comme pour faire tomber un objet. D'un point de vue global, il faut que le point d'application de la force de contact plan/cylindre FC soit au bord du plat ; d'un point de vue microscopique, l'action de contact est une force répartie (pression), et il faut la concentrer du côté du bord. En effet, au moment du basculement, le reste de la surface de contact « décolle », le sol n'exerce pas d'action sur cette partie.
Pour des raisons de clarté, on a représenté l'effort presseur FP et l'effort moteur FR sur le pourtour de la roue, mais en général, il s'agit de l'action de l'axe sur le moyeu.
Enfoncement du plan
En étant enfoncé sous l'effet de l'effort presseur, le plan crée un bourrelet de matière. Ce bourrelet constitue un obstacle au mouvement, une pente que le cylindre doit monter. Sous l'effet de l'effort moteur, l'action de contact plan/cylindre FC se déplace, et le pivotement autour du point de contact devient possible lorsque ce point d'application est au sommet du bourrelet.
Bilan
Dans les deux cas, la force nécessaire pour créer le mouvement dépend de largeur 2a de la surface de contact et du rayon R du cylindre, donc de l'effort presseur et de la raideur du cylindre. On trouve une loi macroscopique similaire à la loi de frottement : la force minimale pour créer le roulement FR, tangentielle, est proportionnelle à l'effort presseur, force normale FP :
- FR = μR⋅FP ;
- μR = a/R.
La demi-largeur du plat, le paramètre a, est appelé coefficient de résistance au roulement.
Cas d'une roue freinée
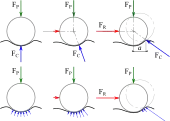
Une roue peut être freinée volontairement, ou bien accidentellement (axe grippé par exemple). Le freinage peut être modélisé comme un couple s'opposant à la rotation, il s'agit donc d'une résistante au pivotement de la roue autour de son axe.
Pour simplifier, on ne représente que la déformation de la roue, et pas celle du sol. Dans un premier temps, on considère une roue à l'arrêt et que l'on veut mettre en mouvement.
Au repos (figure de gauche), et pour les faibles forces motrices, la situation est similaire à une roue libre non freinée. Lorsque la force FR est suffisante pour faire basculer la roue (figure du milieu), le couple résistant (initialement faible) empêche le basculement.
Pour que la roue puisse tourner, il faut que le couple de l'action du sol FC par rapport à l'axe soit suffisant pour vaincre le couple résistant maximum CR :
- FC × d ≥ CR
On voit que la force motrice nécessaire est supérieure au cas de la roue non freinée.
Il peut y avoir dans ce cas une concurrence entre roulement et glissement. Par exemple, dans le cas du freinage d'un véhicule, si le freinage est trop fort, alors les roues se bloquent : la résistance au roulement devient plus forte que la résistance au glissement.
Il est important de prendre en compte ce phénomène dans l'étude d'un galet suiveur sur une came. En effet, le galet a une résistance au roulement qui provient de son palier (liaison arbre/moyeu). On peut ainsi avoir un galet qui ne roule pas mais glisse sur la came, ce qui provoque son usure ; on parle parfois de beurrage.
Dans le cas maintenant d'une roue en mouvement que l'on veut arrêter (typiquement lorsque l'on actionne les freins d'un véhicule), le couple résistant que l'on crée a pour effet d'incliner la force modélisant l'action du sol vers l'arrière, et donc la résultante des forces n'est plus nulle. Du fait du principe fondamental de la dynamique, cela crée donc une accélération vers l'arrière, c'est-à-dire un freinage.
Cas d'une roue motrice
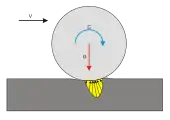
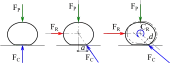
On considère un véhicule dont le mouvement est assuré par l'adhérence de roues motrices sur le sol. On suppose que l'inertie propre de la roue est négligeable devant les efforts nécessaires pour mettre en mouvement le véhicule. On peut donc écrire que la somme des moments extérieurs s'appliquant sur la roue est nulle.
Dans le cas d'une roue motrice, le couple moteur C provient de l'arbre. Lorsque ce couple est faible, l'effort presseur et l'action du sol forment un couple (FP, FC) de résultante nulle et de moment :
- C = FP × d = FC × d.
où d est la distance entre les droites d'action des forces. Plus le couple augmente, plus l'action du sol se décale vers l'avant, jusqu'à arriver à la distance a (figure du milieu). On a donc un couple résistant maximum valant :
- CR = FP × a
on retrouve ici le coefficient de résistance au roulement a, demi-largeur de la zone de contact.
À partir de cet instant-là, la roue peut tourner à vitesse constante. Le travail moteur du couple C est équilibré algébriquement par l'énergie nécessaire pour déformer une zone de contact toujours renouvelée.
Si la voiture accélère, alors la force Fc s'incline vers l'avant.
Coefficient de résistance au roulement
| Crr | Description |
|---|---|
| 0,000 3 à 0,000 4[2] | Roue de chemin de fer en acier sur rail en acier (résistance au roulement statique) |
| 0,001 à 0,001 5[3] | Roulement à billes en acier durci sur acier |
| 0,001 0 à 0,002 4[4] - [5] | Roue de chemin de fer en acier sur rail en acier. Wagon de passager environ 0.0020[6] |
| 0,001 9 à 0,006 5[7] | Roues en fonte de véhicules miniers sur rails en acier |
| 0,002 2 à 0,005[8] | Pneus de bicyclette de production pour 8,3 bar et 50 km/h |
| 0,002 5[9] | Pneus spéciaux éco-marathon |
| 0,005 | Rails sales de tramway (standard) avec et sans virages |
| 0,004 5 à 0,008[10] | Pneus de grands camions |
| 0,005 5[9] | Pneus BMX de bicyclettes typiques pour voitures solaires |
| 0,006 2 à 0,015[11] | Mesure de pneus de voiture |
| 0,010 à 0,015[12] | Pneus de voitures ordinaires sur béton |
| 0,038 5 à 0,073[13] | Diligence (XIXe siècle) sur une route sale. Neige molle sur la route dans le pire cas |
| 0,3[12] | Pneus de voitures ordinaires sur sable |
Le coefficient Crr désigne le coefficient de résistance au roulement (anglais : rolling resistance coefficient). La force de résistance constante s'élève à
- FR = Crr⋅m⋅g
où m est la masse du véhicule et g correspond à la gravité terrestre.
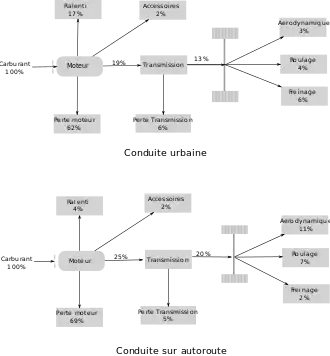
On considère un cas classique de voiture de 1 000 kg avec des roues au coefficient de 0,01. La force de frottement est de 0,01⋅1 000⋅9,81, soit 98 N. Après avoir remarqué que l'unité 1 kWh/100 km équivaut à une force de frottement de 36 N[alpha 1], la force de frottement de 98 N correspond à une consommation de 2,73 kWh pour 100 km. Enfin, puisqu'un litre d'essence équivaut à environ 10 kWh[alpha 1], la consommation due à la seule résistance au roulement peut être estimée à 0,27 L d'essence pour 100 km si l'on avait un moteur thermique et une transmission parfaite. Le rendement d'un moteur thermique étant de l'ordre de 30% la résistance au roulement c'est de l'ordre 1L au 100 km sur une petite citadine d'une tonne (soit pas loin de 20% de la consommation)
Il reste à tenir compte de l'efficacité globale du véhicule, comme le montre le schéma du DoE. Elle s'élève autour de 20 % pour les véhicules thermiques, et autour de 50% pour les véhicules électriques (quand on tient également compte du chauffage et de la climatisation, les pertes du réseau électrique étant incluses)[14], mais il faut tenir compte de la production d'électricité (voir Énergie grise#Électricité).
Le concept de coefficient de frottement est repris dans les diagrammes de Gabrielli – von Kármán, sous une forme toutefois un peu différente.
On mentionne incidemment l'existence d'un glissement (en)[15], proportionnel au couple transmis au droit des roues, et dû à la déformation longitudinale du pneu. Un schéma explique ce phénomène dans le cas d'une courroie élastique entre deux poulies[16]. Le véhicule transmet le couple aux roues, mais à une vitesse (très) légèrement plus faible que la vitesse théorique sans déformation longitudinale du pneu. Cela correspond à une perte d'énergie.
Autre définition du coefficient de résistance au roulement
Le coefficient de résistance au roulement est donc défini comme étant la demi-largeur a de la zone de contact ; il s'exprime habituellement en millimètre. Il dépend du coefficient d'élasticité des matériaux, mais aussi du rayon, de la vitesse de déplacement, de la rugosité… et, dans le cas d'un pneumatique, de la pression de gonflage, ce qui explique que des pneus sous-gonflés augmentent la consommation de carburant.
Pour les applications mécaniques, on retient en général les valeurs suivantes[17].
| Matériaux (roue sur plan) |
a (mm) |
|---|---|
| acier sur acier | 0,4 |
| fonte sur acier | 0,5 |
| caoutchouc plein sur bitume | 3 à 15 |
| pneu sur bitume | 20 à 30 |
| acier sur béton | 10 à 15 |
| acier sur rail (chemin de fer) | 0,5 à 1 |
Dans le cas d'une roue motrice, le couple résistant à vaincre est proportionnel au coefficient de résistance au roulement et à l'effort presseur FP :
- CR = a⋅FP.
Dans le cas d'une roue libre, la force tractrice minimale à fournir pour faire tourner la roue s'exprime par
- FR = μR⋅FP ;
- μR = a/R ;
R étant le rayon de la roue.
Le facteur de résistance global μR est notablement plus faible que le coefficient d'adhérence intervenant dans la résistance au glissement. Cela explique l'intérêt d'interposer un contact roulant lorsque l'on veut réaliser un mouvement relatif entre deux pièces[17].
| Dispositif | μR |
|---|---|
| roulement à billes | 0,001 5 |
| roulement à rouleaux | 0,002 |
| roulement à aiguilles | 0,004 |
Ces valeurs sont à comparer avec les coefficients d'adhérence acier/acier lubrifié (μs ≃ 0,12), acier/bronze lubrifié (μs ≃ 0,1) et téflon/acier (μs ≃ 0,04).
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Rolling resistance » (voir la liste des auteurs).
Références
- (en) « Where the Energy Goes: Gasoline Vehicles », sur Département de l'Énergie des États-Unis, (consulté le ), cité et illustré dans : (en) Transportation Research Board (en), Tires and Passenger Vehicle Fuel Economy : Informing Consumers, Improving Performance, National Research Council, , 178 p., pdf, p. 40.
- Астахов 1966, p. 81.
- (en) « Coefficient of friction, Rolling resistance and Aerodynamics », sur tribology-abc.com (consulté le ).
- Hay 1953, p. 72 fig. 6-2 (worst case shown of 0.0036 not used since it is likely erroneous).
- Астахов 1966, p. 50–55, figs. 3.8, 3.9 et 3.11 ; p. 35–36, figs. 2.3, 2.4, (worst case is 0.0024 for an axle load of 5.95 tonnes with obsolete plain (friction — not roller) bearings).
- Астахов 1966, p. 22, fig. 2.1.
- Hersey 1969, p. 267, table 6.
- (en) « Tire testing conducted by BTR forum member: Al Morriso », sur biketechreview.com, (consulté le ).
- Roche et Schinkel - nom3 = Storey, Speed of Light (ISBN 978-0-7334-1527-2 et 0-7334-1527-X).
- « Crr for large truck tires per Michelin », sur michelintruck.com (consulté le ).
- (en) « Green Seal 2003 Report » [archive], sur greenseal.org (consulté le ).
- Gillespie 1992, p. 117.
- (en) Ira O. Baker, Treatise on roads and pavements, New York, John Wiley, Stagecoach: Table 7, p. 28. Diameter: p. 22-23. This book reports a few hundred values of rolling resistance for various animal-powered vehicles under various condition, mostly from 19th century data.
- La voiture électrique, sur jancovici.com, site de Jean-Marc Jancovici.
- (en) « Tire slip and modeling » [« Glissement des pneus et modélisation »], sur coursera.org.
- (en) « Slippage » [« Glissement »], sur tec-science.com.
- Fan 2007, p. 87.
Voir aussi
Bibliographie
![]() : document utilisé comme source pour la rédaction de cet article.
: document utilisé comme source pour la rédaction de cet article.
- [Fan 20007] Jean-Louis Fanchon, Guide de mécanique : Sciences et technologies industrielles, Nathan, , 543 p. (ISBN 978-2-09-178965-1), p. 87.

- [SG 2003] D. Spenlé et R. Gourhant, Guide du calcul en mécanique : Maîtriser la performance des systèmes industriels, Hachette Technique, (ISBN 978-2-01-168835-4), p. 108-109.
- [Астахов 1966] (ru) П.Н. Астахов, « Сопротивление движению железнодорожного подвижного состава », Транспорт, Moscou, t. 311, , p. 178 (présentation en ligne) anglais : Resistance to motion of railway rolling stock.
- [Hay 1953] (en) William W. Hay, Railroad Engineering, New York, Wiley,
- [Hersey 1969] Mayo D. Hersey, « Rolling Friction », Transactions of the ASME, , p. 260–275 et [Hersey 1970] (en) Mayo D. Hersey, « Rolling Friction », Journal of Lubrication Technology, , p. 83–88 article scindé en deux.
- [Gillespie 1992] (en) T. D. Gillespie, Fundamentals of vehicle dynamics, Warrendale, PA, Society of Automotive Engineers, , 495 p. (ISBN 1-56091-199-9)