Fouillis radar
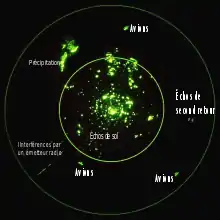
Le fouillis radar est composé des échos parasites revenant de cibles qui sont par définition inintéressantes pour l'opérateur radar. Il est constitué d'échos d'énergie retournés par le sol, par la mer, par les précipitations, par les aéronefs, par les échos se situant au-delà de la portée utile du radar ou de tout autre phénomène obscurcissant le signal recherché comme le bruit de fond.
Les différents utilisateurs ont cependant une idée différente de ce que constitue un écho indésirable. Ainsi les opérateurs à l'aviation veulent éliminer tout ce qui n'est pas l'écho des aéronefs mais les météorologistes considèrent que les avions sont du bruit et ne veulent garder que les signaux provenant des précipitations. Autre exemple, plusieurs études universitaires et gouvernementales ont permis d'extraire les données sur la période, la hauteur et la trajectoire de migration des oiseaux et des papillons Monarques de ces échos parasites[1] - [2]. Ces informations sont utiles pour les programmes d'aménagement des aires naturelles, la planification des parcs éoliens et toute autre activité qui peut influencer les populations d'oiseaux ou d'insectes.
Pour filtrer le fouillis radar, diverses techniques électroniques tenant compte de ses caractéristiques sont utilisées.
Causes
Les échos parasites peuvent provenir d'objets naturels tels que le sol, la mer, les précipitations (pluie, neige ou grêle), les tempêtes de sable, les animaux (particulièrement les oiseaux), les turbulences atmosphériques, et d’autres effets atmosphériques (par exemple les chutes de lithométéores ou les réflexions sur l’ionosphère). Ils peuvent également provenir d'objets fabriqués par l’homme tels que les immeubles ou des paillettes métalliques lâchées intentionnellement comme contre-mesures dans la guerre électronique[3].
Le fouillis comprend également des artéfacts internes au système radar comme la réflexion du faisceau sur les supports du guide d'ondes partant de l'antenne vers le cornet d'émission situé au point focal de l'antenne parabolique. Dans un affichage radar comme le PPI, ces échos indésirables ressembleront à des points très brillants au centre de l’affichage. Le bruit du système électronique et le bruit de fond de l'atmosphère font également partie de ces artéfacts.
Il y a également des artéfacts de l'atmosphère comme des réflexions venant de trajets par réflexions multiples sur une cible[3]. Ainsi, le faisceau radar frappe une cible et comme l'onde émise est réfléchie dans toutes les directions, une partie peut être réfléchie sur une autre cible et retourner au radar. Comme le temps mis pour cette seconde réflexion pour atteindre le radar est plus long que le retour direct, elle sera placée au mauvais endroit ce qui donne deux cibles au lieu d'une. Lorsque l'atmosphère s'éloigne de la stratification normale de température et d'humidité avec l'altitude, il se produit aussi une propagation anormale du faisceau radar. Le trajet du faisceau radar est alors dévié anormalement vers le haut ou le bas et peut subir des réflexions/réfractions ionosphériques ou au sol, créant ainsi des fantômes[3].
Finalement, des objets très réfléchissants visibles peuvent être éclairés par un lobe secondaire du faisceau radar, alors que l'antenne pointe vers une zone moins réfléchissante. L'écho provenant de cet objet sera positionné dans la centrale du faisceau, ou lobe principal, et créera ainsi une fausse cible.
Caractéristiques
On classe généralement ces échos indésirés selon leurs caractéristiques[3] :
- Échos fixes (sol, édifices, etc.) : leur vitesse est généralement nulle en principe mais peut cependant varier légèrement autour de zéro (ex. les branches des arbres bougent sous l’effet du vent) ;
- Échos mobiles de surface : les échos de mer auront souvent une vitesse de déplacement (celle de la crête des vagues) qui varie grandement mais qui ont un retour avec un polarisation particulière ;
- Échos volumiques : Les précipitations et les paillettes de contre-mesures électroniques occupent un large volume et se déplacent. Elles ont des caractéristiques de vitesses, d'intensité et polarisation particulières à chacune ;
- Échos ponctuels : les oiseaux, les éoliennes et les aéronefs sont des cibles ponctuelles ayant des vitesses caractéristiques.
Filtrage
Le fouillis radar est considéré comme une source d’interférences passive, puisqu’il n'est détecté qu'en réponse aux signaux émis par le radar. Il existe plusieurs façons d'éliminer ces échos. Plusieurs de ces méthodes reposent sur le fait que ces échos tendent à être stationnaires lors des balayages du radar et pourront être éliminés par la valeur nulle de leur déplacement noté par l'effet Doppler-Fizeau du signal radar[4]. Ils peuvent aussi être éliminés en comparant des sondages radar successifs, la cible désirée sera mobile et tous les échos stationnaires pourront être éliminés.
Les échos de mer qui comportent un déplacement des vagues peuvent être réduits en utilisant une polarisation horizontale, tandis que la pluie est réduite avec une polarisation circulaire (à noter que les radars météorologiques souhaitent obtenir l’effet inverse, utilisant donc une polarisation horizontale afin de détecter les précipitations). Les autres méthodes visent à augmenter le rapport signal sur bruit.
La méthode CFAR (Constant false alarm rate, parfois appelée AGC pour Automatic Gain Control) repose sur le fait que les échos dus aux parasites sont beaucoup plus nombreux que ceux dus à la cible[5]. Le gain du récepteur est automatiquement ajusté afin de maintenir un niveau constant des échos parasites visibles. Les cibles ayant un retour plus important que les parasites ressortiront facilement de ces derniers, même si les cibles plus faibles se perdent dans le bruit. Par le passé, le CFAR était contrôlé électroniquement et affectait également tout le volume sondé. Maintenant, le CFAR est contrôlé par ordinateur et peut être réglé différemment en chaque zone de l'affichage. Ainsi il s'adapte au niveau des échos parasites selon la distance et l'azimut.
On peut utiliser également des masques de régions connues d'échos parasites permanents (par ex. les montagnes) ou incorporer une carte des environs du radar pour éliminer tous les échos ayant une origine située sous le niveau du sol ou au-dessus d’une certaine hauteur[3]. Pour réduire les retours des supports du cornet d'émission sans diminuer la portée, il est nécessaire d’ajuster la période muette entre le moment où l’émetteur envoie une impulsion et le moment où le récepteur est activé, afin de ne pas tenir compte de retours internes à l’antenne.
Pour filtrer les échos volumiques, comme les précipitations ou les migrations d'oiseaux, il faut connaître leurs caractéristiques d'intensité (réflectivité), de vitesse et de polarisation[6]. L'équation du radar montre que la puissance de l'écho (Pr) est alors [7] : où C est la constante du radar, K est la permittivité des cibles, R est la distance radar-volume sondé et D est le diamètre des cibles individuelles dans le volume.
![{\displaystyle P_{r}=\left[C/R^{2}\right]\left[|K|^{2}\sum D_{i}^{6}\right]}](https://img.franco.wiki/i/67d4a636760a657ca5c29b1302d89192913e6163.svg)
Un problème inhérent à ce type d'échos est que le volume éclairé par le faisceau peut ne pas être complètement rempli ou comporter une variation de la densité des cibles à l'intérieur du volume ce qui influence les caractéristiques de l'écho. Par exemple, un faisceau d'angle d'élévation de 10° pourrait rencontrer de la pluie dans le bas du volume sondé mais le haut du faisceau pourrait être au-dessus des nuages à une certaine distance du radar, l'écho retourné étant la moyenne de l'intensité dans le faisceau partiellement rempli, un algorithme développé pour détecter et/ou filtrer les échos volumiques pourrait donc être inefficace dans ces situations.
Notes et références
- (en) Robert H. Diehl, Ronald P. Larkin et John E. Black, « Radar Observations of Bird Migration over the Great Lakes », The Auk, The American Ornithologists' Union, vol. 120, no 2, , p. 278-290 (ISSN 1938-4254, DOI 10.1642/0004-8038%282003%29120%5B0278%3AROOBMO%5D2.0.CO;2, lire en ligne [PDF], consulté le )
- (en) François Gagnon, Marc Bélisle, Jacques Ibarzabal, Pierre Vaillancourt et Jean-Pierre L. Savard, « A Comparison between Nocturnal Aural Counts of Passerines and Radar Reflectivity from a Canadian Weather Surveillance Radar », The Auk, The American Ornithologists' Union, vol. 127, no 1, , p. 119-128 (ISSN 1938-4254, DOI /10.1525/auk.2009.09080, lire en ligne [PDF], consulté le )
- Chritian Wolff (trad. Pierre Vaillant), « Fouillis d'échos », Fréquence Doppler et la cohérence, sur www.radartutorial.eu, Radartutorial (consulté le ).
- Chritian Wolff (trad. Pierre Vaillant), « Filtre Doppler du fouillis », Fréquence Doppler et la cohérence, sur www.radartutorial.eu, Radartutorial (consulté le ).
- Chritian Wolff (trad. Pierre Vaillant), « Taux de fausses alarmes », Les principes du radar, sur www.radartutorial.eu, Radartutorial (consulté le ).
- (en) M.H. Golbon-Haghighi et al., « Detection of Ground Clutter from Weather Radar Using a Dual-Polarization and Dual-Scan Method », Atmosphere, vol. 7, no 6, , p. 83 (lire en ligne [PDF])
- (en) Merrill I. Skolnik, Radar handbook, New York, 3, , 1328 p. (ISBN 978-0-07-148547-0 et 0-07-148547-3, résumé), chap. 19.2, p. 929