Adimensionnement
L'adimensionnement (parfois appelé aussi dédimensionnement) est la suppression partielle ou totale des unités d'une équation par une substitution appropriée de variables, dans le but de simplifier la représentation paramétrique de problèmes physiques. Elle est étroitement reliée à l'analyse dimensionnelle. L'adimensionnement ne doit pas être confondu avec la conversion de paramètres extensifs d'une équation en paramètres intensifs, car cette dernière procédure conduit toujours à des variables auxquelles des unités sont attachées.
L'adimensionnement permet aussi de retrouver les propriétés caractéristiques d'un système. Par exemple, si un système possède une fréquence de résonance intrinsèque, une longueur, ou une constante de temps, l'adimensionnement permet de retrouver ces valeurs. La technique est particulièrement utile pour les systèmes qui peuvent être décrits par des équations différentielles.
On peut trouver de nombreux exemples explicatifs d'adimensionnement dans la simplification d'équations différentielles. En effet, un grand nombre de problèmes physiques peuvent être formulés sous cette forme, et l'adimensionnement est bien adapté à leur traitement. Cependant, il permet aussi de traiter d'autres types de problèmes sortant du champ des équations différentielles, comme l'analyse dimensionnelle.
On trouve des exemples d'adimensionnement dans la vie courante : les instruments de mesure en constituent un exemple. Les instruments de mesure font en effet l'objet d'un étalonnage par rapport à une unité particulière connue, préalablement à leur utilisation ; on applique ensuite une transformation (normalisation) aux mesures effectuées de façon à les obtenir dans cette unité, la démarche inverse permettant de retrouver la valeur réelle d'une mesure à partir de la valeur normalisée correspondante.
Justification
Supposons qu'un pendule oscille selon une période T. Il peut être avantageux, pour étudier un tel système oscillant, de le faire relativement à cette période T. On peut considérer cette opération comme une sorte de normalisation de la mesure par rapport à la période.
Les mesures effectuées relativement à une propriété intrinsèque d'un système s'appliqueront à d'autres systèmes qui possèdent la même propriété intrinsèque. Cela permet aussi de comparer une propriété commune à différentes mises en œuvre du même système. L'adimensionnement détermine de façon systématique les unités caractéristiques d'un système, sans qu'il soit nécessaire de connaître précisément les propriétés intrinsèques de celui-ci. En fait, l'adimensionnement peut suggérer les paramètres qui devraient être utilisés pour analyser un système ; il est cependant nécessaire de partir d'une équation le décrivant de façon appropriée.
Étapes de l'adimensionnement
L'adimensionnement d'un système d'équations s'effectue selon la démarche suivante :
- Identifier toutes les variables indépendantes et dépendantes ;
- Remplacer chacune d'elles par une quantité normalisée par rapport à l'unité de mesure caractéristique à déterminer ;
- Diviser par le coefficient du terme de plus grand ordre ;
- Choisir judicieusement la définition de l'unité caractéristique pour chaque variable de façon à obtenir des coefficients égaux à 1 pour le plus grand nombre de termes possible ;
- Réécrire le système d'équations en fonction de leurs nouvelles quantités sans dimension.
Les trois dernières étapes sont habituellement spécifiques au problème auquel on applique l'adimensionnement. En revanche, les deux premières étapes sont indispensables pour pratiquement tous les systèmes.
À titre d'exemple, considérons une équation différentielle du premier ordre à coefficients constants :

- Dans cette équation, la variable indépendante est et la variable dépendante .
- Posons . Il en découle l'équation
- Le coefficient du terme de plus grand ordre est celui de la première dérivée. La division donne
- Le coefficient de contenant uniquement une variable caractéristique , il est plus facile de commencer par ce terme :
- Il en résulte
- L'équation finale adimensionnée devient dans ce cas complètement indépendante des paramètres avec unités :










Substitutions
Considérons un système simple caractérisé par deux variables : une variable dépendante et une variable indépendante , où est une fonction de . Les variables et représentent tous deux des quantités avec unité. Pour normaliser ces deux variables, supposons qu'il existe deux unités de mesure intrinsèques et dont les unités sont respectivement les mêmes que et , telles que les conditions suivantes soient remplies :



Ces équations sont utilisées pour remplacer et lors de l'adimensionnement. Si des opérateurs différentiels sont nécessaires pour décrire le système original, leurs homologues normalisés deviennent des opérateurs différentiels sans dimension.
Conventions
Bien que les noms destinés à remplacer x et t ne fassent l'objet d'aucune restriction, on les choisit généralement de telle sorte qu'ils paraissent commodes et intuitifs lors de leur utilisation dans le problème considéré. Par exemple, si x représente la masse, la lettre m pourrait être un symbole approprié pour représenter la quantité de masse sans dimension.
Dans cet article, les conventions suivantes sont utilisées :
- t représente la variable indépendante, habituellement une quantité de temps. Son homologue adimensionné est τ.
- x représente la variable dépendante, qui peut être une masse, une tension électrique ou toute autre quantité mesurable. Son homologue adimensionné est χ.
Un c souscrit ajouté au nom d'une variable associée à une quantité est utilisé pour indiquer l'unité caractéristique utilisée pour normaliser cette quantité. Par exemple, si x est une quantité, alors xc est l'unité caractéristique utilisée pour la normaliser.
Opérateurs différentiels
Considérons la relation

L'expression des opérateurs différentiels sans dimension par rapport à la variable indépendante devient

Fonction de forçage
Si un système possède une fonction de forçage f(t), alors

Ainsi, la nouvelle fonction de forçage F est rendue dépendante de la quantité sans dimension τ.
Équations différentielles linéaires à coefficients constants
Système du premier ordre
Considérons l'équation différentielle pour un système du premier ordre :
La dérivation des unités caractéristiques donne

Système du second ordre
Un système du second ordre est de la forme

Étape de substitution
Remplaçons les variables x et t par leurs homologues sans dimension. L'équation devient

Cette nouvelle équation n'est pas sans dimension, bien que toutes les variables avec unités sont isolées dans les coefficients. En divisant par le coefficient du terme de plus grand ordre, l'équation devient

Il est ensuite nécessaire de déterminer les quantités de xc et tc de telle sorte que les coefficients deviennent normalisés. Comme il existe deux paramètres libres, on ne peut rendre égaux à un que deux coefficients au maximum.
Détermination des unités caractéristiques
Considérons la variable tc :
- Si , le terme du premier ordre est normalisé.
- Si , le terme d'ordre zéro est normalisé.


Les deux substitutions sont valides. Cependant, pour des raisons pédagogiques, la dernière substitution est utilisée pour les systèmes du second ordre. Choisir cette substitution permet à xc d'être déterminé par la normalisation du coefficient de la fonction de forçage :

L'équation différentielle devient

Le coefficient du terme du premier ordre est sans unité. Définissons

La présence du facteur 2 permet de paramétrer les solutions en fonction de ζ. Dans le contexte de systèmes mécaniques ou électriques, ζ est connu comme le taux d'amortissement, et est un paramètre important nécessaire à l'analyse des systèmes de contrôle. Le résultat de la définition est l'équation différentielle de l'oscillateur harmonique :

Systèmes d'ordre plus élevé
L'équation différentielle linéaire d'ordre n à coefficients constants s'écrit, sous sa forme générale :

La fonction f(t) est connue sous le nom de fonction de forçage.
Si l'équation différentielle contient uniquement des coefficients réels (aucun coefficient complexe), alors un tel système se comporte comme une combinaison de systèmes du premier et du deuxième ordre uniquement. Ceci est dû au fait que les racines de son polynôme caractéristique sont, soit réelles, soit des paires de complexes conjugués. Ainsi, comprendre comment l'adimensionnement s'applique aux systèmes du premier et du second ordre permet de déterminer les propriétés des systèmes d'ordre plus élevé par utilisation du principe de superposition.
Le nombre de paramètres libres dans une forme adimensionnée d'un système augmente avec son ordre. Pour cette raison, l'adimensionnement est rarement utilisé pour des équations différentielles d'ordre élevé. L'apparition du calcul formel a également réduit la nécessité de cette procédure.
Exemples de récupération des unités caractéristiques
Il est possible de représenter divers systèmes physiques de façon approchée au moyen de systèmes du premier ou du second ordre. C'est le cas notamment des systèmes mécaniques, électriques, fluides, thermiques et torsionnels. En effet, les quantités physiques fondamentales impliquées dans chacun de ces exemples sont liées par des dérivées du premier et du second ordre.
Oscillations mécaniques
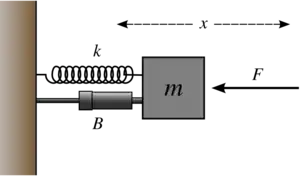
Supposons une masse attachée à un ressort et à un amortisseur, eux-mêmes attachées à un mur, et une force agissant sur la masse selon la même ligne.
Définissons :
- x = déplacement à partir de l'équilibre [m]
- t = temps [s]
- f = force externe ou « perturbation » appliquée au système [kg⋅m⋅s−2]
- m = masse du bloc [kg]
- B = constante d'amortissement de l'amortisseur [kg⋅s−1]
- k = constante de force du ressort [kg⋅s−2]
Supposons que la force appliquée est une sinusoïde F = F0 cos(ωt) ; l'équation différentielle qui décrit le mouvement du bloc est alors :

L'adimensionnement de cette équation selon la méthode décrite dans la rubrique système du second ordre ci-dessus fournit plusieurs caractéristiques du système.
L'unité intrinsèque xc correspond à la distance dont le bloc se déplace par unité de force

La variable caractéristique tc est égale à la période des oscillations

et la variable sans dimension 2ζ correspond à la largeur de bande du système. ζ lui-même est le taux d'amortissement.

Premier ordre : circuit RC série
Pour un circuit RC série relié à une alimentation électrique

soit après substitutions

la première unité caractéristique correspond à la charge électrique totale dans le circuit. La seconde unité caractéristique correspond à la constante de temps du système.
Second ordre : circuit RLC série
Pour une configuration série de composants R, C, L où Q est la charge dans le système

soit après substitutions

La première variable correspond à la charge maximum stockée dans le circuit. La fréquence de résonance est donnée par l'inverse du temps caractéristique. La dernière expression est la largeur de bande du système. Ω peut être considéré comme fréquence de la fonction de forçage normalisée.
Autres équations différentielles
En l'absence d'une méthode générale de résolution, on se contentera de donner un exemple emprunté à la mécanique quantique.
Oscillateur harmonique quantique
L'équation de Schrödinger pour un oscillateur harmonique quantique à une dimension indépendant du temps est :
- ;

C'est une équation différentielle linéaire, mais à coefficients non constants (en raison de la présence du terme ).

La fonction d'onde ψ elle-même représente une probabilité, qui est d'une certaine façon déjà sans dimension et normalisée. Il n'est donc pas nécessaire d'adimensionner la fonction d'onde. Cependant, elle doit être réécrite comme une fonction d'une variable sans dimension. En outre, la variable x a une unité de type longueur. Substituons alors :

L'équation différentielle devient :

Pour rendre le terme devant χ² sans dimension, posons :

L'équation adimensionnée complète ainsi obtenue est :

Le facteur d'adimensionnement pour l'énergie est le même que celui de l'état fondamental de l'oscillateur harmonique. Habituellement, le terme correspondant à l'énergie n'est pas rendu sans dimension car l'un des objets principaux de la mécanique quantique est de déterminer les énergies des états d'un système. En réarrangeant la première équation, on met l'équation de l'oscillateur harmonique quantique sous une forme canonique :
- .

Voir aussi
Articles connexes
Bibliographie
- (en) Mathematical Models in the Applied Sciences, Andrew Cadle Fowler, Cambridge University Press, 1997 (ISBN 978-0-521-46703-2) - chapitre Nondimensionalization (Extraits Google Books)
Liens externes
- (en) Analysis of differential equation models in biology: a case study for clover meristem populations, K. Louie, H. Clark, P.C.D. Newton, New Zealand Journal of Agricultural Research, 1998, Vol. 41: 567-576 (application de l'adimensionnement à un problème de biologie)
- (en) Course notes for Mathematical Modelling and Industrial Mathematics, Jonathan Evans, Department of Mathematical Sciences, University of Bath (voir le chapitre 3)
Source
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Nondimensionalization » (voir la liste des auteurs).