Système vis-écrou
Le système vis-écrou, parfois appelé système vis-noix, est un mécanisme d'entraînement en translation. Il se compose d'une tige filetée, la vis, et d'une pièce comportant un filetage intérieur, l'écrou (ou noix). Trois conceptions sont possibles :
- premier cas : on fait tourner la vis pour entraîner l'écrou en translation :
- la tige filetée est entraînée en rotation autour d'un axe fixe par rapport au bâti de la machine,
- ll'écrou est guidé en translation par rapport au bâti ;
- deuxième cas : on fait tourner l'écrou pour entraîner la vis en translation ;
- troisième cas : l'écrou est fixe par rapport au bâti ; la vis avance ou recule lorsqu'on la fait tourner.
Le premier cas est couramment utilisé pour mettre des pièces en mouvement, par exemple la table d'une fraiseuse, un vérin électrique, un chariot… Les deuxième et troisième cas sont plus souvent utilisé pour effectuer des réglages.
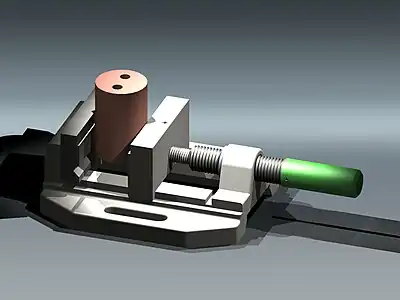
C'est donc un mécanisme de transformation de mouvement utilisant le principe de la vis et de l'écrou, c'est-à-dire la liaison hélicoïdale. En général il permet la transformation d'un mouvement de rotation en un mouvement de translation. C'est par exemple le dispositif le plus communément adopté sur les étaux, et autres pressoirs mais aussi les crics. Rarement réversible comme sur l'objectif d'un appareil photo, il peut toutefois constituer la transformation inverse.
Approche cinématique
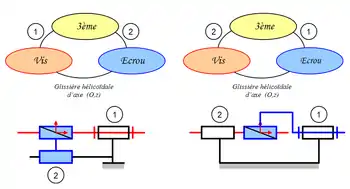
Pour obtenir un dispositif de transformation de mouvement, il faut associer au couple vis-écrou une troisième pièce. On a dans tous les cas trois liaisons :
- la vis et l'écrou sont liés par une liaison hélicoïdale d'axe (O,z) (ici horizontal), alors
- une liaison (1) lie la vis (ou l'écrou) en translation, et doit donc autoriser la rotation autour de l'axe (O,z). Le pivot est le modèle le plus évident.
- une liaison (2) lie l'écrou (ou la vis) en rotation, et doit donc autoriser la translation dans la direction Z. La glissère est le modèle le plus évident, mais le système est alors hyperstatique ; il suffit en fait d'une liaison ponctuelle pour empêcher la rotation.
Nous avons donc deux familles de solutions structurellement symétriques : vis guidée en rotation et écrou guidé en translation, ou bien vis guidée en translation et écrou guidé en rotation.
Le principe est toujours le même : il s'agit de bloquer la rotation de la vis (ou de l'écrou) et inversement la translation de l'écrou (ou de la vis). Le rapport de transformation est alors d'une valeur du pas de vis pour un tour de l'élément tournant.
Avec une glissière et un pivot le modèle est fortement hyperstatique ; il existe d'autres solutions cinématiques moins contraignantes. Le choix dépendra des efforts nécessaires au guidage des éléments.
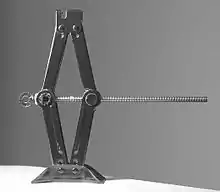
Dans un cric automobile de type parallélogramme, le dispositif vis-écrou permet le contrôle d'une diagonale, l'autre assurant la levée du véhicule. La structure est alors plus complexe avec au moins 6 pièces.
Approche statique
De même que la liaison hélicoïdale convertit une rotation en une translation, elle convertit un couple et une force de poussée. Ceci dépend de deux facteurs :
- la géométrie de la vis : le pas et le profil du filetage ;
- le coefficient de frottement entre le filetage de la vis et le filetage de l'écrou.
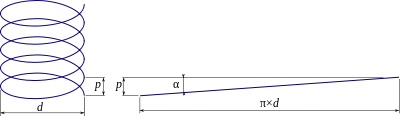
En développant la vis (en la « déroulant »), le filetage de la vis est équivalent à un plan incliné. Si l'on considère une hélice d'axe vertical de diamètre d et de pas p, l'angle que fait la tangente avec l'horizontale vaut :
- .

Si le profil du filetage est carré[1] et que l'on néglige le frottement, alors la force de contact au niveau du filet est inclinée de cet angle α par rapport à l'axe. Cette force F a donc :
- une composante axiale Fa = F⋅cos α ; c'est la force de poussée
- une composante tangentielle Ft = F⋅sin α ; cette composante donne le couple résistant
C = Ft⋅r = Ft⋅d/2.
On a donc :
- F = Fa/cos α
- Ft = Fa⋅sin α/cos α = Fa⋅tan α = Fa⋅p/(πd)
- C = Fa⋅tan α⋅d/2 = Fa⋅p/(2π)
On voit que cela ne dépend que du pas, et pas du diamètre. On a à l'inverse :
- Fa = 2π⋅C/p
donc pour un couple C donné, on a une amplification de l'effort qui est en 1/p. Pour un couple de 1 N m (effort fourni par une visseuse-dévisseuse sans fil bas de gamme) et un pas de 5 mm = 0,005 m, on obtient une force de 1 260 N, ce qui permet de lever 126 kg.
Le frottement peut être modélisé selon la loi de Coulomb par l'angle du cône de frottement, φ. On a alors :
- Ft = Fa⋅tan(α + φ)
- C = Fa⋅tan(α + φ)⋅d/2
si la force qu'exerce l'écrou est opposée au mouvement, ou bien
- Ft = Fa⋅tan(α – φ)
- C = Fa⋅tan(α – φ)⋅d/2
si la force est dans le sens du mouvement.
Dans la formule de la force
- Ft = Fa⋅tan(α ± φ)
nous voyons que le facteur tan(α ± φ) définit le rendement. Il ne dépend que de l'angle de frottement φ, et donc du coefficient de frottement μ, et de l'angle du pas de vis α, donc de la géométrie du système.
Le frottement diminue le rendement, il doit donc être le plus faible possible. Au minimum, la liaison doit être lubrifiée. On choisit également des couples de matériaux ayant un coefficient faible ; par exemple, on favorise un écrou en bronze ou en Téflon, et l'on évite un contact inox/inox.
Le meilleur rendement est obtenu en remplaçant un contact glissant par un contact roulant, ce qui donne une vis à billes.
Si le profil du filetage est incliné (par exemple profil trapézoïdal ou triangulaire), alors la force est de plus inclinée dans le plan radial d'un angle θ, ce qui augmente le couple nécessaire pour fournir une poussée Fa.
Réversibilité
Dans le premier type de conception, un actionneur (manivelle, motoréducteur) entraîne la vis en rotation, la vis entraînant elle-même l'écrou en translation (pour peu que celle-ci soit bloquée en rotation). Si l'on pousse sur l'écrou dans le sens de la descente (en opposition) :
- dans certaines conditions, cela met la vis en rotation, le système est dit réversible ;
- dans la majeure partie des cas, le frottement fait que le système reste bloqué, une poussée sur l'écrou est sans effet.
Dans le second type de conception, un actionneur (clef plate) entraîne l'écrou en rotation, l'écrou entraînant lui-même la vis en translation (pour peu que celle-ci soit bloquée en rotation). Si l'on pousse sur la vis dans le sens de la descente (en opposition) :
- dans certaines conditions, cela met la vis en rotation, le système est dit réversible ;
- dans la majeure partie des cas, le frottement fait que le système reste bloqué, une poussée sur l'écrou est sans effet.
La réversibilité peut se déduire en calculant le couple : s'il est négatif, notre système est réversible : dans le cas de la descente
- .

Puisque seul le signe importe, nous constatons que la réversibilité dépend uniquement du facteur de rendement tan(φ – α) et donc du coefficient de frottement et de la géométrie de la vis.
Technologie et exemples
Si l'effort à transmettre est faible, on peut utiliser une tige filetée et un écrou standards (filetage métrique ISO, à filet triangulaire). Si l'effort est important, on a recours à un filetage trapézoïdal. Le flanc du filet est incliné de θ = 15° (angle du filet) par rapport à l'axe radial.
| Diamètre nominal d (mm) |
Pas p (mm) | |
|---|---|---|
| recommandé | autre | |
| 8 | 1,5 | — |
| 10 | 2 | 1,5 |
| 12 | 2 | 1,5 |
| 16 | 3 | 2 |
| 20 | 3 | 2 ; 4 |
| 25 | 4 | 3 ; 5 |
| 32 | 6 | 4 |
| 40 | 6 | 4 ; 8 |
| 50 | 8 | 5 ; 10 |
| 63 | 8 | 5 ; 12 |
| 80 | 10 | 5 ; 16 |
| 100 | 12 | 6 ; 20 |
Notes et références
Liens externes
- Notices dans des dictionnaires ou encyclopédies généralistes :