Système de positionnement en intérieur
Un système de positionnement en intérieur ou système de géolocalisation en intérieur permet de trouver la position d'objets ou de personnes dans un espace interne à une structure (bâtiments, maisons...).
La localisation joue un rôle essentiel dans la vie de tous les jours. Alors que la localisation basée sur les GPS est populaire, sa prolifération dans les environnements intérieurs est limitée. Cela est dû à la mauvaise pénétration des signaux GPS à l’intérieur des bâtiments et à l'absence fréquente de systèmes de localisation intérieure.
L'adoption du système du GPS par les téléphones mobiles, combinée avec le Wi-Fi et les réseaux de téléphonie mobile, a en grande partie permis de résoudre le problème de la géolocalisation en extérieur. Cependant, ce type de système ne peut pas servir à la géolocalisation dans les espaces intérieurs car cela demande une prise en compte de certaines particularités comme les étages d'un bâtiment. Néanmoins, la localisation reste depuis toujours un domaine actif de la recherche ce qui a abouti à l'émergence de nombreuses solutions de localisation interne qui requièrent du matériel informatique avec un coût parfois important.
Dans les espaces comme les aéroports, les centres commerciaux et les hôpitaux, avec les réseaux de données devenant de plus en plus accessibles et l'augmentation du nombre d'applications nécessitant une géolocalisation, la localisation en intérieur est devenue un véritable enjeu.
Critères importants
La cartographie
La localisation ou le positionnement d'un objet ou d'une personne détermine son emplacement dans un certain système de référence. Dans les environnements extérieurs, à l'aide du GPS, les coordonnées sur un plan ou une carte sont représentées en 2D : la longitude et la latitude. Cependant, ce type de référence ne peut être utilisé pour les espaces intérieurs où il peut exister une connectivité irrégulière entre les pièces, les escaliers, les murs, les portes et les différents niveaux.
La navigation dans les environnements intérieurs nécessite alors l'utilisation d'une représentation appropriée. En général, la topographie des espaces en 3D représente un aspect fondamental de la navigation en intérieur[1].
La navigation implique plusieurs concepts[1]:
- La localisation
- La planification d'itinéraires : Des algorithmes sont nécessaires pour trouver les chemins appropriés entre le point de départ et la destination en fonction de la distance, du temps ou d'autres critères comme la rapidité. Ces algorithmes dépendent du type de modèle choisi, du contexte ou encore du profil de l'utilisateur. Des informations comme l'existence de portes, passages ou escaliers sont essentielles pour la planification d'itinéraires.
- L'orientation : L'utilisateur doit être assisté par l'application tout au long du parcours qu'il a choisi.
Précision du positionnement
La précision du positionnement est l'un des critères les plus importants pour la géolocalisation intérieure. En effet, à la différence de la géolocalisation extérieure, la géolocalisation interne à un bâtiment doit intégrer la dimension de l'espace (c'est-à-dire les étages, les escaliers...) mais aussi la taille de l'espace. S'il y a plusieurs petits espaces, le système permettant la géolocalisation interne doit permettre une localisation fine pour pouvoir distinguer aisément les différents espaces.
Aujourd'hui différentes technologies offrent des précisions plus ou moins importantes allant de 15 mètres à 10 centimètres (le Bluetooth et l'ultra wideband par exemple).
Chacune de ces technologies et leur architecture respective correspondent à des besoins et ont des caractéristiques différentes qui elles mêmes imposent des contraintes. Par exemple le Bluetooth est moins précis que l'UWB mais a une autonomie plus longue car l'UWB a une intensité d’émission beaucoup plus importante ce qui consomme davantage d'énergie.
Infrastructures
Certains systèmes de géolocalisation intérieure ont besoin d'infrastructures et d'équipements tandis que d'autres s'appuient sur des technologies plus accessibles.
Les systèmes avec infrastructures bien que précis (par exemple le système Cricket[2]) sont souvent très coûteux et difficiles à mettre en place.
Il existe cependant des infrastructures plus abordables et plus faciles à maitriser qui utilisent des technologies déjà existantes. Cela permet de réduire les coûts aussi bien pour les entreprises vendant ce genre de solutions que pour les clients qui ont intérêt à minimiser leurs dépenses.
Généralement l'infrastructure comprend au minimum :
- Un objet muni d'une puce (téléphone, tag Bluetooth ou UWB par exemple).
- Une balise qui va permettre de couvrir une zone géographique et ainsi capter le signal de l'objet contenant la puce (tag BLE ou ancre UWB par exemple).
- Une ancre qui capte l'information et la transmet au gateway.
- Un gateway qui va transmettre l'information aux outils de calculs et d’interprétations (software).
- Un terminal qui permet à l'utilisateur d'avoir accès aux informations et de les interpréter. (tablette, laptop, smartphone, etc)
Modélisation de l’espace interne
Une modélisation d'un espace en intérieur doit représenter une vision de l'essentiel des informations spatiales de l'environnement. Il existe plusieurs types de modèles (listés ci-dessous) pouvant représenter les structures des différents éléments d'un environnement intérieur (construction, design...) ou des visions graphiques via un support de navigation. Les modèles CityGML (en) et IFC (Industry Foundation Classes) proposent des représentations topographiques d'environnements en intérieur. Ils fournissent, en grande partie, les informations nécessaires pour connaitre les environnements intérieurs. Cependant, ils ne proposent pas de modèles standards pour tous les types d'environnement puisque des informations importantes ne sont pas forcément décrites comme les passages entre les escaliers et les différentes zones d'un espace intérieur[1].
Modèles sémantiques
Les modèles sémantiques décrivent les différents types d'entités présents dans un environnement intérieur en termes de propriétés et de relations. On peut ainsi faire une distinction entre les structures dites "fixes" (les murs, les portes, les fenêtres...) et les éléments mobiles (les meubles, les personnes...). Ce modèle joue un rôle important dans la localisation et la navigation[3].
Modèles topologiques
Les modèles topologiques représentent les propriétés des connectivités dans un espace intérieur. Il existe deux aspects de l'environnement en intérieur que ce modèle prend en compte[4] :
- Les espaces topographiques : espaces contenant les espaces constituant un bâtiment (pièces, couloirs, portes, etc.).
- Les "Dual space" : espaces décrivant les chemins parcourus dans un espace topologique. Ces espaces sont modélisés en graphes souvent appelés "routing graph".
Modèles hybrides
Des modèles géométriques sont parfois nécessaires pour la modélisation d'un bâtiment ou sa construction. De nombreux modèles peuvent être hybrides tout en étant topologiques mais aussi géométriques. La géométrie ajoute des valeurs précises concernant les distances et les angles des connectivités entre les entités fournis par la topologie. D'autres modèles hybrides peuvent également établir des liaisons entre la topographie, la dualité, la topologie et la géométrie[5].
Technologies
Radio FM
Les recherches du centre create-net qui ont exploité cette technologie illustrent cette approche. Les avantages des ondes radio FM sont multiples. Entre autres, les stations FM fournissent une couverture mondiale, tandis que les tuners FM sont facilement disponibles dans de nombreux appareils mobiles[6]. De plus, ils ont une faible consommation d'énergie et ils n’interfèrent pas avec d'autres équipements sensibles ou sans fil, ce qui fait des radios FM une alternative prometteuse pour la géolocalisation interne. Pourtant, il y a eu peu de recherches exploitant cette technologie, dû au fait que les recherches sur la géolocalisation dans les milieux extérieurs n'ont pas donné de très bons résultats.
Propriétés des signaux FM
- Les signaux FM sont peu affectés par les conditions météo (pluie...), contrairement au Wi-Fi et au GSM.
- Les ondes radio de basse fréquence sont moins sensibles aux conditions du terrain, tels que les bois et le feuillage des arbres.
- Les signaux FM pénètrent les murs plus facilement par rapport à une connexion Wi-Fi ou GSM[7].
Approche
L'approche est basée sur une méthode de localisation par empreinte radio (fingerprinting signal). Elle comprend deux étapes: l’étalonnage et la localisation.
- « La phase d'étalonnage comprend l'acquisition de caractéristiques (généralement le RSSI) des signaux issus des émetteurs stationnaires (balises) en des points prédéfinis, qui sont utilisés pour construire une base de données qui correspond aux valeurs collectées (empreintes digitales) avec les emplacements correspondants »[8].
- « Au cours de la phase de localisation, le dispositif mobile acquiert une empreinte digitale du signal et le système de positionnement utilise les données d'étalonnage, couplées à des algorithmes appropriés pour déterminer la meilleure correspondance pour l'emplacement auquel l'empreinte digitale appartient le plus probablement »[8].
Résultats
Les résultats des expérimentations ont montré que les variations à grande échelle des signaux de radio FM ambiants sont minimes à des distances de plusieurs mètres dans un espace externe. En revanche, les variations à petite échelle jouent un rôle important dans de petits espaces intérieurs, tels que des pièces fermées, en raison de la grande longueur d'onde des ondes radio FM (~ 3 m). De plus, les ondes FM montrent une efficacité énergétique supérieure, offrant 2,6 à 5,5 fois plus d'autonomie qu'une connexion Wi-Fi. Cependant l'utilisation des ondes FM pour la localisation nécessite un casque ou une oreillette faisant antenne. Ce frein est facilement surmontable car l'utilisation de casques est devenue très répandue du fait de la présence de lecteurs MP3 dans les téléphones mobiles. De même, il existe maintenant des mobiles avec des antennes internes (comme le NOKIA 5030)[9].
Signal TV
Le signal émit par les émetteurs de télévisions peut permettre de positionner un terminal à l'intérieur d'un bâtiment[10].
Bluetooth
Un réseau de balises Bluetooth low energy peut permettre de localiser un smartphone[11] ou bien même un Tag Bluetooth qui est lui même attaché à un objet afin d'avoir une traçabilité au sein d'une usine par exemple. La précision du Bluetooth est comprise entre 10 et 2 mètre selon la qualité du signal.
L'intensité des ondes Bluetooth est trop faible pour représenter quelconques danger pour la santé ou des interférences, c'est pour cela qu'aucun encadrement n'est nécessaire.
Ultra Wide Band
La technologie UWB ou Ultra Wide Band est en pleine expansion. Elle permet de géolocaliser à 10 cm près dans des milieux très denses et métalliques. Grâce à son protocole de communication, elle permet de se prémunir d'une série de problèmes liés au Bluetooth ou au WiFi.
De nombreuses applications sont possibles : musées, agriculture, centres commerciaux, sites industriels, complexes hospitaliers ou militaires, etc..
Concernant la loi Française et Européenne, les fréquences UWB comprennent deux parties : de 3,4 GHz à 4,8 GHz et de 6 GHz à 8,5 GHz. Dans ces bandes de fréquences aucune déclaration ne doit être faites dans le cas contraire des démarches administratives doivent être faites.
LoRaWAN
Le LoRaWAN est un protocole de télécommunication permettant la communication à bas débit, par radio, d'objets à faible consommation électrique communiquant selon la technologie LoRa et connectés à l'Internet via des passerelles, participant ainsi à l'Internet des objets. Ce protocole est utilisé dans le cadre des villes intelligentes, le monitoring industriel ou encore l'agriculture. La technologie de modulation liée à LoRaWAN est LoRa, créée en 2009 par la start-up grenobloise Cycléo et rachetée par Semtech en 2012. Semtech promeut sa plateforme LoRa grâce à la LoRa Alliance, dont elle fait partie. Le protocole LoRaWAN sur la couche physique LoRa permet de connecter des capteurs ou des objets nécessitant une longue autonomie de batterie (comptée en années), dans un volume (taille d'une boite d'allumettes ou d'un paquet de cigarettes) et un coût réduit. Ce protocole peut être couplé avec des technologies existantes telles que le BLE ou l'UWB afin de faciliter la transmission de donnée et sa portée.
Combinaison des technologies RFID et WLAN
La localisation en temps réel et le support de mobilité à travers le protocole IP (Internet Protocol) sont les principales problématiques qui doivent être résolues. Mobile IP est la solution la plus connue afin de gérer le support de mobilité mais soulève également des problèmes de latence durant les transferts de données. Le délai de latence est dû au temps nécessaire pour détecter le mouvement d'un nœud mobile (Mobile Node) dans un sous-réseau (IP Movement Detection).
Il existe une solution à ces problèmes qui intègre simultanément deux technologies existantes : les Wireless Local Area Network (WLAN ou Wi-Fi) et la Radio Frequency Identification (RFID).
RFID est composée de deux éléments :
- un lecteur : Le lecteur RFID permet de lire les identifiants des tags.
- un tag : Les tags RFID sont des puces apposées sur des objets. Ils permettent d'identifier des objets à distance grâce à un lecteur qui capte les données existantes dans la puce. Ils peuvent être :
- actifs : Ces types de tags sont alimentés par pile ou batterie.
- passifs : Ces tags ne possèdent pas de batterie. C'est le signal du lecteur qui, par induction, active ces tags et leur permet de fonctionner en leur induisant du courant.
Par ailleurs, la norme IEEE 802.11 (Wi-Fi) qui est le plus répandu des WLAN, possède deux modes d'opérations :
- ad hoc mode : deux ou plusieurs nœuds sans-fils sont reliés directement pour établir une communication en peer-to-peer sans infrastructure.
- infrastructure mode : une entité appelée "Access Point" (AP) fait la passerelle pour toutes les données circulant entre les nœuds mobiles qui lui sont associés.
La technologie RFID est donc responsable de la collecte d'informations utilisées pour la localisation et le système du "handover management" qui permet de maintenir le trafic de communications de données. Elle est néanmoins limitée par son incapacité à établir des connexions directes entre les lecteurs et les tags. La technologie WLAN contrôle et coordonne ainsi le processus de lecture par les lecteurs RFID.
Dans le système, les identifiants des tags RFID sont combinés à la localisation ainsi qu'aux informations topologiques afin de déterminer la position et de prévoir le prochain sous-réseau d'un nœud mobile à l'aide d'un lecteur qui lui est attaché. Pour ensuite traiter les problèmes d'interférences qui sont les principales limitations de la technologie RFID, le système exploite les capacités de coordination fournies par le WLAN.
Les raisons de l'utilisation d'un tel système sont liées au faible coût des tags passifs, à la prochaine génération des terminaux mobiles qui auront la capacité de lecture des tags RFID et à l'omniprésence des WLAN dans les environnements intérieurs[12].
Localisation basée sur l'image
Les approches basées sur la vision pour la localisation dans les milieux intérieurs ne reposent pas sur l'infrastructure et sont donc évolutives et pas chères[13]. Les travaux de l'Institute for Media Technology de Munich en Allemagne, présentent une interface utilisateur combinée d'éléments de la réalité virtuelle et de la réalité augmentée avec des indicateurs qui aident à communiquer et à assurer la précision de la localisation. Dans cette approche, l'appareil photo du smartphone est utilisé.
« Cette visualisation augmente la vidéo de la caméra du smartphone en superposant des informations de navigation, comme une flèche directionnelle et la distance au prochain tour. L'inconvénient de cette méthode est que les utilisateurs doivent tenir le téléphone en position verticale afin de voir l'augmentation directement sur leur chemin. L'image vidéo est utilisée pour localiser le dispositif dans l'environnement (en termes de position et d'orientation), de sorte que les zones d'affichage peuvent être placées avec précision. »[14].
« Cette visualisation utilise des images préenregistrées de l'environnement qui forment un panorama à 360 degrés sur l'appareil mobile ». L'avantage de cette méthode est que l'utilisateur n'a pas à tenir le smartphone verticalement pour voir les instructions de navigation, comme pour la réalité augmentée, ce qui est plus confortable pour l'utilisateur. Au lieu de cela, des flèches directionnelles sont directement intégrées dans le panorama.
Des tests et des simulations ont été effectués et des utilisateurs testeurs ont ainsi exprimé leur préférence pour la réalité virtuelle ou la réalité augmentée. Les avis des utilisateurs sont divers et hétérogènes, et de ce fait une combinaison de la réalité augmentée et de la réalité virtuelle est très bénéfique voire nécessaire dans les systèmes de navigation basée sur l'image.
Techniques d'ultrasons des téléphones mobiles
Aujourd'hui, les systèmes de positionnement en intérieur précis nécessitent en général des équipements qui n'existent pas dans les téléphones actuels. La recherche dans ce domaine essaye donc de mettre en place un système de positionnement efficace dans les smartphones afin de fournir aux utilisateurs des localisations et des directions précises.
Les smartphones peuvent envoyer et recevoir des ondes sonores par l'intermédiaire de leurs haut-parleurs et leurs microphones. En comparaison avec la vitesse de la lumière, le son se propage plus lentement. Cette situation permet d'utiliser le temps de propagation dans le but de déterminer la position voulue. Il a été démontré par ailleurs qu'il est tout à fait possible d'utiliser le son pour mesurer la distance entre deux téléphones mobiles qui utilisent une synchronisation par les techniques d'angle d'arrivée (Angle of Arrival (en))[15].
Les systèmes basés sur les ultrasons peuvent avoir des niveaux de précision en millimètre et en centimètre, mais ne sont donc pas compatibles avec les smartphones actuels. Il existe néanmoins une solution appelée Lok8 qui permet une compatibilité avec les smartphones[16].
Fonctionnement
Un signal d'ultrason est émis par un téléphone mobile et capturé par des microphones placés dans l'environnement. Les téléphones mobiles peuvent produire des signaux ultrasonores sans aucun bruit tant que le volume des haut-parleurs ne dépasse pas un certain seuil. Mais cette configuration est relative à chaque smartphone[15].
Une propagation lente et un support d'ultrasons permettent l'absence de bruits et d'un positionnement possible au centimètre près dans les mobiles.
Lok8 est une approche très prometteuse pour le positionnement dans un espace intérieur. Aucun matériel spécifique n'est vraiment requis du côté client. L'utilisateur peut juste installer l'application qui permet de se servir de Lok8[17].
Résultats
La nature des ultrasons, la susceptibilité aux bruits à certaines hautes fréquences ainsi que le tracé de chemins multiples (multipath) entre l'émetteur et le récepteur ont été identifiés comme les principaux obstacles à la précision du positionnement.
En outre, cette technique ne fonctionne pas très bien si les téléphones sont dans des sacs ou des poches. Toutefois, les applications, sur lesquelles Lok8 est utilisé, interagissent avec l'utilisateur qui possède son téléphone en mains propres. La capacité de travailler en arrière-plan est uniquement importante s'il y a une étude du suivi des différentes positions des personnes; ce qui n'est pas réellement l'objectif de Lok8.
Il peut exister également des problèmes d'exactitude quand l'utilisateur est en dehors de l'espace de réception de l'un des microphones. Ce problème peut être résolu en ajoutant des microphones ou en utilisant des microphones omnidirectionnels. Malheureusement, ces microphones sont assez coûteux.
Outre ces limitations, Lok8 est aujourd’hui la seule solution qui offre un système de positionnement fiable et efficace en temps-réel pour les smartphones[17].
Centrale inertielle (IMU)
Des recherches menées par l'université de l'Ohio [18] utilisent les signaux de localisation d'une centrale à inertie (utilisée dans la navigation inertielle) combinée avec une caméra (pour la vision) et avec un détecteur de mouvement (pour détecter les pas). L'avantage de ce système est qu'il ne dépend pas de la détection du champ magnétique ni d'un réseau de capteurs sans fil. Le concept général est d'adopter un filtre de Kalman étendu pour l'intégration de données en temps réel.
Matériel
Le matériel nécessaire est composé :
- d'un GPS,
- d'un détecteur de mouvements
- d'un système IMU
- d'un appareil stéréoscopique.
Principe
Avant d'entrer dans un bâtiment, le GPS enregistre la dernière position à l'extérieur où les signaux GPS sont encore actifs. L'IMU enregistre continuellement les accélérations et la vitesse angulaire de l'utilisateur. Le détecteur de mouvements détecte les phases stationnaires où l'utilisateur ne bouge pas et enfin la caméra enregistre l'information visuelle locale. Avec la position initiale de l'utilisateur rapportée par le GPS, l'intégration des trois sources de données peut combiner les trois aspects de l'information spatiale pour connaitre le déplacement de l'utilisateur[19].
Champ magnétique terrestre
Il est possible de positionner un objet à l'intérieur d'un bâtiment grâce au champ magnétique ambiant. Cette solution offre une précision de 1 à 2m[20]. Elle est utilisable sur tous les smartphones munis d'un compas.
Algorithmes
Algorithme de positionnement avec les WLAN
Le WLAN (Wireless Local Area Network) est un système de communication très répandu (plus connu sous le nom de « réseau Wi-Fi ») et attirant les recherches et des investigations dans le monde entier. Il offre de grandes opportunités de développement pour l'estimation de la position dans les espaces intérieurs. L'algorithme de positionnement par "fingerprinting" (Wi-Fi positioning system (en)) a été utilisé pour certains WLAN (Wi-Fi) grâce à sa haute précision et à l'absence d'investissements nécessaires. Cet algorithme se compose de deux phases : "off-line measurement" et "on-line measurement" qui intègrent également différents algorithmes de positionnements comme NN (en) (Nearest-Neighbor) ou KNN (K Nearest-Neighbour). Néanmoins, ce système de positionnement pose plusieurs problèmes, à savoir les charges de calcul lourdes et des soucis d'efficacité et de précision des estimations de position dus à la complexité de la structure des bâtiments. Plusieurs solutions ont néanmoins été proposées afin de résoudre ces problématiques mais la plupart de celles-ci ne peuvent pas concilier simultanément des coûts de calcul raisonnables et la précision du positionnement[21].
L'algorithme "WLAN Indoor Positionning Algorithm Based On Sub-Regions Information Gain Theory"[22] a permis de diminuer les coûts de calcul tout en atteignant une haute précision de positionnement. Il combine les algorithmes "KNN", "K means clustering" et "Information Gain Theory".
La méthode standard de positionnement par le système du fingerprinting à l'aide du RSSI

Les processus de lecture de plusieurs points de contrôle par le système de mesures du RSS (Received signal strength indication) permettent de mesurer la puissance en réception d'un signal radio ; ces mesures peuvent être collectées pour chaque emplacement intérieur dans une phase appelée "fingerprinting".
L'algorithme de positionnement par le fingerprinting avec les mesures de RSS (Received Signal Strength) implique deux étapes :
- "off_line" ou "training phase" : construit un ensemble de données basées sur des "fingerprinting" appelé "radio map" qui représente les coordonnées de positionnements (RPs) et les RSS à partir de tous les points d'accès (APs).
- "on-line" ou "estimation phase": afin de localiser un terminal mobile à un endroit donné, le système mesure et enregistre les RSS de tous les APs qui sont ensuite envoyés à un certain algorithme pour y être comparés avec les informations enregistrées dans la "radio map".
Après la fin de ces deux phases, le système évalue la position la plus probable du terminal mobile[21].
Amélioration de l'estimation du positionnement WLAN en intérieur en utilisant l'algorithme KNN
Bien qu'on puisse utiliser un grand nombre d'APs dans le but d'améliorer le calcul de l'estimation de la position, il a été démontré que le système ne peut atteindre une grande précision. Il existe effectivement une forte corrélation entre les différents APs lorsque leurs propres données sont intégrées dans le calcul; ce qui peut provoquer des erreurs dans l'estimation de positionnement pour chacun d'entre eux.
La méthode qui suit combine les algorithmes "KNN" et "Information Gain Theory". Elle a pu apporter de meilleures performances de calcul de localisation à l'aide d'un sous-ensemble de tous les APs. Elle divise également la totalité de la région de positionnement en un certain nombre de sous-régions et applique par la suite l'algorithme "Information Gain Theory" afin de sélectionner les APs dans une certaine sous-région[21].
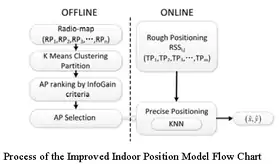
Le modèle amélioré se décompose donc en deux étapes[21] :
- La première étape est constituée de la phase "off-line" et se divise en plusieurs sous-étapes :
- K-means Clustering Partition : L'application de l'algorithme "K-means Clustering" pour partitionner une région en K sous-régions. Cette méthode considère uniquement les caractéristiques de la structure d'un bâtiment dans la zone de positionnement. Par exemple, les toilettes seront définies comme étant une sous-région.
- AP Ranking : L'application de l'algorithme "Information Gain Theory" dans chaque sous-région afin de trier les APs selon certains critères.
- AP Selection : Un AP est sélectionné à partir du tri effectué par l'AP Ranking selon le positionnement trouvé pour qu'il puisse ensuite contribuer au processus d'estimation de la position précise dans la phase on-line.
- La seconde étape est complétée avec la phase "on-line" et se divise également en plusieurs étapes :
- Rough Positionning : La mesure des RSS reçus par le terminal dont on recherche la position, à partir de tous les APs disponibles, est utilisée pour donner une estimation de position dans une certaine sous-région.
- Precise Positionning : L'algorithme KNN est appliqué à l'aide de l'AP obtenu dans la phase off-line afin de donner une estimation précise de la position du terminal dans la sous-région (sélectionnée dans l'étape Rough Positionning).
Résultats
En utilisant cet algorithme, la précision du positionnement est amélioré de 4,67 % et le nombre d'APs qui participent au processus de calcul du positionnement peut être diminué de 33,33 %[23].
Cas d'utilisations
Localisation d'objets dans un espace intérieur
Localiser des objets dans un espace intérieur comme les livres mal placés dans une bibliothèque ou des produits dans un supermarché est parfois une tâche laborieuse. À l'aide de la technologie RFID, on peut localiser la position d'un certain objet dans des environnements comme des pièces, des salles ou des bibliothèques. Les objets devront néanmoins être tagués avec une puce RFID[24].
Sherlock est, par exemple, un système qui permet à l'être humain d'interagir avec des objets à l’aide de la technologie RFID. Il combine l’utilisation des concepts de capteurs, radars, et d’infographie pour mettre sur pied un nouveau système de localisation d’objets de tous les jours. Au cœur de Sherlock, une nouvelle technique de localisation avec la technologie RFID utilise des antennes orientables qui vont scanner le lieu pour découvrir, localiser et indexer les objets tagués. En réponse aux requêtes utilisateurs, Sherlock affichera les résultats des objets localisés en utilisant des images de caméra[25].
Messages en 'Post-It'
Une application peut permettre aux utilisateurs de « poster » un message lorsqu'ils sont à proximité d'une certaine position. Si l'utilisateur se trouve proche d'un périphérique Bluetooth ou d'un point d'accès sans-fil, un message est envoyé au téléphone mobile de l'utilisateur. L'application peut également être utilisé dans un environnement outdoor. Le principe est de rappeler ou d'informer l'utilisateur d’effectuer une certaine tâche dans un lieu donné. Par exemple, si le père entre dans une garderie, l'application lui rappelle qu'il doit demander à un éducateur de la petite enfance si son enfant a effectué sa sieste l'après-midi[24].
Message de rappel en cas d'oubli
Il existe plusieurs moments où des personnes quittent leurs bureaux précipitamment pour une réunion, une conférence, ou d'autres types d'événements, en oubliant des choses importantes. Des tags RFID peuvent donc être apposés sur certains objets. L'application pourra ainsi permettre à l'utilisateur à programmer ses événements où chaque événement sera relié à un ensemble d'objets (par exemple, pour une conférence : un pointeur laser, un ordinateur, un téléphone...). Si un objet manquant est détecté lorsque l'utilisateur quitte son bureau, le système informe l'utilisateur sur son téléphone mobile ou sur son ordinateur portable[26].
Demande d'informations et Génération d'itinéraires
À l'entrée d'un musée, il peut y avoir une indication informant que le musée est équipé de technologies de navigation virtuelle et est complétée avec un QR code. L'utilisateur scanne ce code et installe l'application dans son téléphone mobile. L'utilisateur observe un vase du XIIe siècle et souhaite obtenir plus d'informations. Il pointe son téléphone vers le vase pour initialiser la requête. Grâce à l'efficacité de l'estimation de la position par l'accéléromètre et d'autres composants du téléphone, le système est capable d'identifier le vase. Le téléphone affiche alors une page avec des informations qui sont des liens, du texte, du son et des vidéos.
L'utilisateur est également intéressé par une peinture qu'il semble avoir déjà vue. À l'aide de l'application, il effectue une demande de requête d'informations concernant le tableau et découvre que le peintre est Claude Monet, un impressionniste. L'utilisateur souhaite connaître davantage sur l’impressionnisme dans le domaine de la peinture. Il demande alors à l'application de le guider. Le système lui propose un parcours efficace et approprié fournissant toutes les localisations de ce type de peinture à partir de sa position. Grâce à l'efficacité du calcul de positionnement, l'application est capable d'afficher la localisation de la prochaine peinture facilitant la navigation en la rendant plus confortable en essayant d'éviter toutes confusions[27].
Notes et références
- Modeling indoor space 2011, p. 1,2
- The Cricket location-support system
- Modeling indoor space 2011, p. 2
- Modeling indoor space 2011, p. 2,3
- Modeling indoor space 2011, p. 3
- Investigation of indoor localization with ambient FM radio stations
- Investigation of indoor localization with ambient FM radio stations page 171
- Investigation of indoor localization with ambient FM radio stations page 173 Section III. FM Positionning
- Investigation of indoor localization with ambient FM radio stations page 178
- « TruePosition Acquires Intellectual Property from Rosum », sur https://www.trueposition.com, (consulté le )
- http://www.cl.cam.ac.uk/~rmf25/papers/BLE.pdf
- Integrating RFID and WLAN for indoor positioning and IP movement detection 2012, p. 861,862
- A mobile indoor navigation system interface adapted to vision-based localization
- Réalité Augmentée Section 4.1 Augmented and Virtual Reality
- Indoor Positioning for Smartphones Using Asynchronous Ultrasound Trilateration 2013, p. 602
- Indoor Positioning for Smartphones Using Asynchronous Ultrasound Trilateration 2013, p. 603
- Indoor Positioning for Smartphones Using Asynchronous Ultrasound Trilateration 2013, p. 616,617
- spatial orientation and information system for indoor spatial awareness
- spatial orientation and information system for indoor spatial awareness page 11, section "Overview of the approach"
- https://www.indooratlas.com/wp-content/uploads/2016/03/magnetic_positioning_opus_jun2014.pdf
- WLAN Indoor Positioning Algorithm Based On Sub-Regions Information Gain Theory 2013, p. 4789-4790
- WLAN Indoor Positioning Algorithm Based On Sub-Regions Information Gain Theory 2013
- WLAN Indoor Positioning Algorithm Based On Sub-Regions Information Gain Theory 2013, p. 4794
- Localization and interaction in active indoor environments 2010, p. 1
- Sherlock: Automatically Locating Objects for Humans 2008
- Localization and interaction in active indoor environments 2010, p. 1,2
- Indoor Positioning for Smartphones Using Asynchronous Ultrasound Trilateration 2013, p. 600
Bibliographie
- (en) Michael Worboys, « Modeling indoor space », ISA '11 Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, , p. 1-6 (ISBN 978-1-4503-1035-2, DOI 10.1145/2077357.2077358)
 (source utilisée pour la rédaction de cet article)
(source utilisée pour la rédaction de cet article)
- (en) Rongxing Li, Boris Skopljak, Shaojun He, Pingbo Tang, Alper Yilmaz et Jinwei Jiang, « A spatial orientation and information system for indoor spatial awareness », ISA '10 Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, , p. 10-15 (ISBN 978-1-4503-0433-7, DOI 10.1145/1865885.1865889)
- (en) Lars Kulik, « Localization and interaction in active indoor environments », ISA '10 Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, , p. 1-2 (ISBN 978-1-4503-0433-7, DOI 10.1145/1865885.1865887)
- (en) Andreas Möller, Matthias Kranz, Robert Huitl, Stefan Diewald et Luis Roalter, « A mobile indoor navigation system interface adapted to vision-based localization », MUM '12 Proceedings of the 11th International Conference on Mobile and Ubiquitous Multimedia, no 4, (ISBN 978-1-4503-1815-0, DOI 10.1145/2406367.2406372)
- (en) Apostolia Papapostolou et Hakima Chaouchi, « Integrating RFID and WLAN for indoor positioning and IP movement detection », Journal Wireless Networks, vol. 18, no 7, , p. 861-879 (DOI 10.1007/s11276-012-0439-y)
- (en) Viacheslav Filonenko, Charlie Cullen et James D. Carswell, « Indoor Positioning for Smartphones Using Asynchronous Ultrasound Trilateration », Journal of Geo-Information, (ISSN 2220-9964, DOI 10.1007/s11276-012-0439-y)
- (en) Andrei Popleteev, Venet Osmani et Oscar Mayora, « Investigation of indoor localization with ambient FM radio stations », 10th IEEE Pervasive Computing and Communication conference, , p. 171 - 179 (DOI 10.1109/PerCom.2012.6199864)
- (en) Lin Ma, Xinru Ma, Xi Liu et Yubin Xu, « WLAN Indoor Positioning Algorithm Based On Sub-Regions Information Gain Theory », Wireless Communications and Networking Conference (WCNC), 2013 IEEE, , p. 4789 - 4794 (ISSN 1525-3511, DOI 10.1109/WCNC.2013.6555351)
- (en) Nissanka B. Priyantha, Anit Chakraborty et Hari Balakrishnan, « The Cricket location-support system », MobiCom '00 Proceedings of the 6th annual international conference on Mobile computing and networking, , p. 32 - 43 (ISBN 1-58113-197-6, DOI 10.1145/345910.345917)
- (en) Aditya Nemmaluri, Mark D. Corner et Prashant Shenoy, « Sherlock: Automatically Locating Objects for Humans », MobiSys '08 Proceedings of the 6th international conference on Mobile systems, applications, and services, , p. 187-198 (ISBN 978-1-60558-139-2, DOI 10.1145/1378600.1378621)
Liens externes
- (en) Indoor Geolocation Science and Technology, Kaveh Pahlavan, Xinrong Li, et Juha Pekka Makela, IEEE Communications Magazine, . [PDF]