Moteur pas à pas
Un moteur pas à pas permet de transformer une impulsion électrique en un mouvement angulaire.

On trouve trois types de moteurs pas à pas :
Historique
Le moteur pas à pas fut inventé en 1936 par Marius Lavet, un ingénieur français des Arts et Métiers, pour l'industrie horlogère[4].
Application
Ce type de moteur est très courant dans tous les dispositifs où l'on souhaite faire du contrôle de vitesse ou de position en boucle ouverte, typiquement dans les systèmes de positionnement et d'indexation.
L'usage le plus connu du grand public est dans les imprimantes classiques et imprimantes 3D, les scanner et les platines vinyle de DJ. Mais ils sont présents dans de nombreuses applications telles : les photocopieurs, imprimantes bancaires, robotique, instrumentation, pompes à perfusion, pousse-seringues, système de positionnement sur machine industrielle et machine-outil.
Moteur à réluctance variable
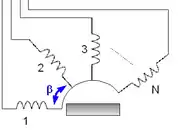
Les moteurs à réluctance variable (moteurs MRV) doivent leur nom au fait que le circuit magnétique qui les compose s'oppose de façon variable à sa pénétration par un champ magnétique.
Ces moteurs sont composés d'un barreau de fer doux et d'un certain nombre de bobines. Lorsqu'on alimente une bobine, le champ magnétique cherche à minimiser le passage dans l'air. Ainsi l'entrefer entre la bobine et le barreau se réduit. Le barreau s'aligne avec le champ magnétique pour obtenir une réluctance minimale. On alimente la phase 1, puis la phase 2, puis la phase 3... Si nous souhaitons changer le sens du moteur, il suffit de changer l'ordre d'alimentation des bobines.
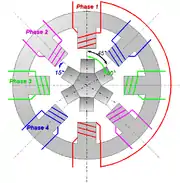
Dans la pratique, le barreau de ferrite a plusieurs dents (ici 6). Dès qu'on alimente la phase 2, il y a une rotation de 15° (c.-à-d. 60° - 45° = 15°), puis la phase 3, etc. Donc le moteur tourne de 15° dès qu'on alimente une phase. Il faut 24 impulsions pour faire un tour complet. C'est un moteur 24 pas.
- Inconvénients
- nécessite au moins trois bobinages pour obtenir un cycle complet; pas de couple résiduel (c’est-à-dire que, hors tension, le rotor est libre, ce qui peut être problématique pour ce genre de moteur). La fabrication est assez délicate, les entrefers (distance bobine - barre de fer) doivent être très faibles.
- Avantages
- peu coûteux, d'une bonne précision. Dans l'exemple, avec seulement 4 enroulements, on obtient 24 pas (on peut facilement obtenir 360 pas). Le sens du courant dans la bobine n'a aucune importance.
Moteur à aimants permanents
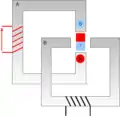
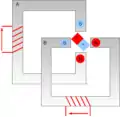
Les moteurs à aimants permanents sont semblables aux moteurs à réluctance variable, sauf que le rotor possède des pôles nord et sud. À cause des aimants permanents, le rotor reste freiné à sa dernière position lorsque le bloc d'alimentation cesse de fournir des impulsions.
Une façon simple de voir le système, est de placer une boussole entre deux aimants. Suivant la bobine qui est alimentée et le sens du courant, l'aimant va s'aligner avec le champ.
Fonctionnement à pas complet
 Pas no 1
Pas no 1 Pas no 2
Pas no 2 Pas no 3
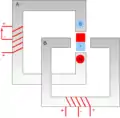
Pas no 3 Pas no 4
Pas no 4
| Impulsion | Bobine A | Bobine A | Bobine B | Bobine B |
|---|---|---|---|---|
| T1 | + | – | ||
| T2 | + | – | ||
| T3 | – | + | ||
| T4 | – | + |
Fonctionnement avec couple maximal
On alimente les bobines, deux par deux à chaque fois. Il y a toujours quatre pas.
 Pas no 1
Pas no 1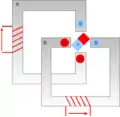 Pas no 2
Pas no 2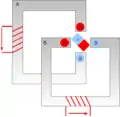 Pas no 3
Pas no 3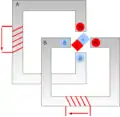 Pas no 4
Pas no 4
| Impulsion | Bobine A | Bobine A | Bobine B | Bobine B |
|---|---|---|---|---|
| T1 | + | – | + | – |
| T2 | + | – | – | + |
| T3 | – | + | – | + |
| T4 | – | + | + | – |
Fonctionnement à demi-pas
Si on mélange les deux fonctionnements, on peut obtenir le double de pas, pour faire un tour complet, il faut 8 pas. On parle alors de demi-pas.
- Pas no 1
- Pas no 2
- Pas no 3
- Pas no 4
- Pas no 5
- Pas no 6
- Pas no 7
- Pas no 8
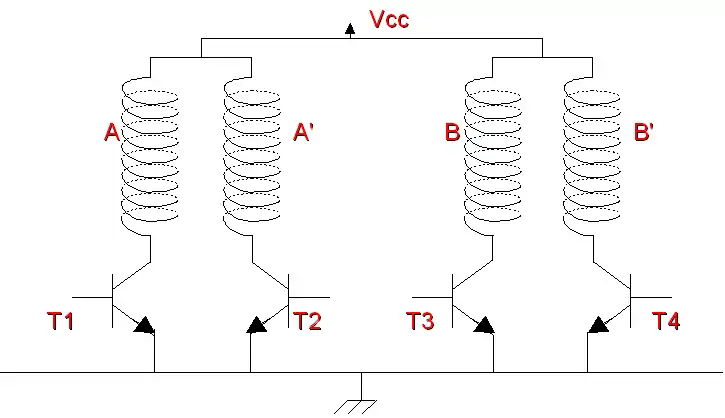
Moteur à aimant permanent unipolaire
Dans les exemples précédents, on a vu que l'on alimente les enroulements dans les deux sens de courant, il existe des versions avec des demi-bobines (avec un point milieu). L'avantage est que l'on n'inverse jamais le sens du courant, donc la commande est plus simple. Tout le problème est que l'on « double » le nombre d'enroulements, donc le moteur est plus coûteux et encombrant, néanmoins cela reste très courant pour les petites puissances.
 Pas no 1
Pas no 1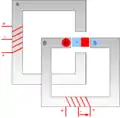 Pas no 2
Pas no 2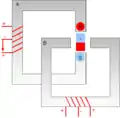 Pas no 3
Pas no 3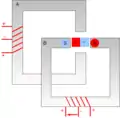 Pas no 4
Pas no 4
Moteur pas à pas hybride
Le moteur pas à pas hybride emprunte du moteur à aimant permanent et de la machine à réluctance variable. Il est donc à réluctance variable mais avec un rotor à aimants permanents. L'avantage est un nombre de pas très élevé.
Principes communs aux moteurs pas à pas
Caractéristique dynamique
Les moteurs pas à pas ne sont pas des moteurs rapides, les plus rapides dépassent rarement la vitesse maximale de 3 000 tr/min.
Cette « lenteur » aidant, et ces moteurs étant naturellement sans balais (la majorité des moteurs pas à pas de haute qualité est de plus équipée de roulements à billes), ces moteurs ont une durée de vie extrêmement longue, sans nécessiter d'entretien.
Influence de la charge et de la cinématique
Toute application impliquant l'utilisation d'un moteur pas à pas nécessite de collecter les informations indispensables à un bon dimensionnement :
- la masse de la charge à entraîner (en kg) ;
- son inertie (en kg m2) ;
- le type d'entraînement mécanique (vis, courroie crantée, crémaillère, etc.) ;
- le type de guidage, afin d'estimer les frottements (secs et visqueux) ;
- les efforts de travail (en N) ;
- le déplacement le plus critique (distance en fonction d'un temps).
L'influence de la charge est directement liée au calcul du couple moteur via les paramètres du calcul inertiel (en kg m2) et de l'accélération (en m s−2). Pour des paramètres d'accélération et de chaîne cinématique identiques, un moteur pas à pas n'aura pas besoin du même couple selon la charge mise en jeu.
Pour une application industrielle, le dimensionnement d'un moteur pas à pas doit être calculé de façon rigoureuse ou être surdimensionné afin d'éviter tout problème de glissement par « perte de pas ». Le moteur pas à pas fonctionnant en boucle ouverte (sans asservissement), il ne récupère pas sa position de consigne en cas de glissement.
Pilotage des bobines
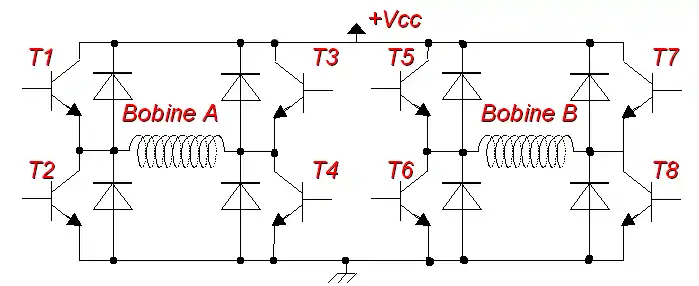
Pour un moteur pas à pas type bipolaire.
C'est le principe du pont en H, si on commande T1 et T4, alors on alimente dans un sens, soit on alimente en T2 et T3, on change le sens de l'alimentation, donc le sens du courant.
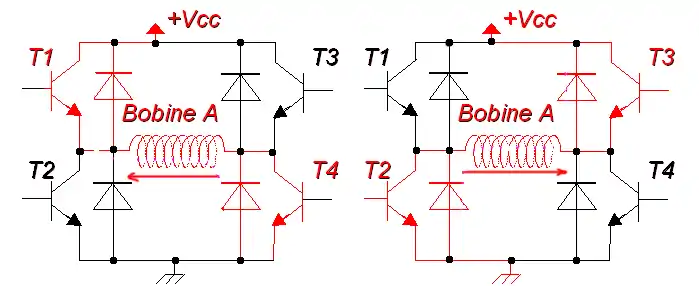
Mini-conclusion : le moteur bipolaire est plus simple à fabriquer, mais il nécessite 8 transistors alors que le moteur unipolaire ne nécessite que 4 transistors.
Un moteur pas à pas est une charge inductive. Comme visible ci-dessus, des diodes de roue libre sont nécessaires pour assurer la circulation du courant lors du blocage des transistors, par exemple à chaque demande de réduction du courant (régulation par hacheur), ou à chaque demande de changement de sens du courant (changement de pas).
Notes et références
- Le moteur pas à pas à réluctance variable, sur le site moteurindustrie.com, consulté le 20 décembre 2015
- Le moteur pas à pas à aimant permanent, sur le site moteurindustrie.com, consulté le 20 décembre 2015
- Hybride, sur le site mdp.fr, consulté le 20 décembre 2015
- Marius Lavet, sur le site fondam.org, consulté le 20 décembre 2015