Microprocesseur multi-cœur
Un microprocesseur multi-cœur (multi-core en anglais) est un microprocesseur possédant plusieurs cœurs physiques fonctionnant simultanément. Il se distingue d'architectures plus anciennes (360/91) où un processeur unique commandait plusieurs circuits de calcul simultanés.
-0322.jpg.webp)
Un cœur (en anglais, core) est un ensemble de circuits capables d’exécuter des programmes de façon autonome. Toutes les fonctionnalités nécessaires à l’exécution d'un programme sont présentes dans ces cœurs : compteur ordinal, registres, unités de calcul, etc. Il peut exister plusieurs niveaux de mémoires cache, certaines à l'intérieur de chaque cœur, d'autre partagées entre certains, ou tous les cœurs.
Histoire
Origines
Le terme « multi-cœur » est employé pour décrire un processeur composé d’au moins deux cœurs (ou unités de calcul) gravés au sein de la même puce.
On doit à IBM le premier processeur multi-cœur à avoir été commercialisé : il s'agit du POWER4, en 2001. En 2003, Sun lance l’UltraSPARC IV composé de 2 cœurs UltraSPARC III. En 2004, HP lance le PA-8800 composé de 2 cœurs PA-8700.
Les premiers exemplaires de processeurs multi-cœurs d’Intel et d’AMD sont arrivés sur le marché des ordinateurs personnels en 2005[1]. Il s’agissait de cœurs homogènes, c’est-à-dire identiques. Le cas de cœurs différents et spécialisés dans des domaines bien précis (audio, affichage, calcul pur, etc) a été exploité pour le processeur Cell conçu par IBM, Sony et Toshiba. Ce type d’architecture permet d’augmenter la puissance de calcul sans augmenter la fréquence d’horloge, et donc de réduire la quantité de chaleur dissipée par effet Joule (comme pour les systèmes multiprocesseurs).
Les premières puces double cœur basées sur l’architecture x86 sont apparues en 2005 sur le marché des serveurs (Opterons d’AMD). Elles sont apparues parce qu’en pratique la course au GHz devenait onéreuse et compliquée. La génération de processeurs de cette époque ne possédait qu’un seul cœur et avait une consommation qui pouvait dépasser largement les 100 W (notamment sur les processeurs Intel Pentium 4). Elle devait donc faire face à de graves problèmes de refroidissement des circuits[2]. La solution qui a semblé la plus évidente a été de privilégier non plus la fréquence, mais d'accroître la puissance grâce à une architecture parallèle, de façon à pouvoir augmenter le nombre d’opérations exécutées simultanément en un cycle d’horloge.
Évolution de la technologie
Depuis le lancement du premier ordinateur sur le marché, les demandes en capacité de calcul sont devenues de plus en plus importantes. Le multitraitement symétrique (SMP) a longtemps été utilisé pour améliorer les performances et l’efficacité informatiques en répartissant les charges sur plusieurs processeurs. Le SMP est particulièrement efficace dans les environnements multiprocessus où plusieurs tâches (processus) doivent être gérées simultanément.
Avec l’évolution des demandes de performances applicatives, les concepteurs de processeurs sont confrontés à un problème : L’augmentation des capacités informatiques est tributaire de la puissance, et le fait d’augmenter la puissance nécessite de gérer aussi les niveaux de dissipation. À cela s’ajoutent les demandes des industriels qui souhaitent des ordinateurs moins encombrants, à savoir plus de serveurs par baie, des ordinateurs portables plus fins et plus légers, et un encombrement réduit pour les systèmes de bureau. Le traitement multicœur contribue à relever ces défis. Cette évolution technologique augmente les performances et la productivité dans des ordinateurs de plus petite taille capables d’exécuter simultanément plusieurs applications complexes et de réaliser davantage de tâches en moins de temps.
Un langage comme Go permet de concevoir des programmes qui fonctionneront sans réécriture sur un nombre quelconque de cœurs.
Processeurs multicœurs existants
Il existe actuellement plusieurs architectures de processeurs multi-cœurs. Outre les modèles d’Intel et AMD déjà cités, Sun Microsystems a développé sa gamme Niagara et Niagara II ; IBM a développé sa gamme de PowerPC et sa ligne CellBE, commercialisée par IBM sous forme de serveur lame, par Mercury sous forme de châssis renforcé. Le tout premier processeur double cœur pour smartphone lancé par Nvidia fut le Tegra 2 lancé en 2011.
L’industrie cherche dans le même temps à multiplier le nombre de cœurs présents sur un processeur, par exemple Intel dans son projet Tera-Scale.
En février 2020, lors de la conférence internationale des circuits à semi-conducteurs de San Francisco, le Laboratoire d'électronique et de technologie de l'information y présente un processeur à 96 cœurs[3] - [4].
Partage des caches
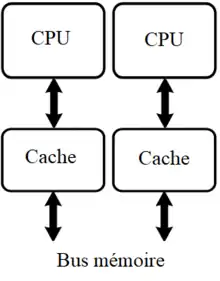
Tout processeur actuel contient des mémoires caches, qui rendent les accès à la mémoire plus rapides. Sur les processeurs multicœurs, l'organisation de ces mémoires caches est adaptée à la présence de plusieurs cœurs. Deux grandes organisations de base sont utilisées : celle à base de caches dédiés à chaque cœur, et celle à base de caches partagés.
Dans le cas des caches dédiés, chaque cœur possède son propre cache, que lui seul peut utiliser. On trouve donc un cache pour chaque cœur.
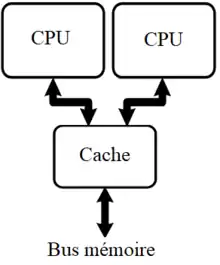
Avec les caches partagés, la mémoire cache est partagée entre tous les processeurs, qui peuvent y accéder de façon concurrente.
Avantages et inconvénients des caches dédiés
L'organisation à base de caches dédiés a quelques avantages :
- Un programme qui s’exécute sur un cœur ne va pas polluer le cache d'un autre processeur : deux programmes exécutés sur des cœurs différents n’interfèrent pas ;
- Le temps d'accès à un cache dédié est souvent plus faible que celle d'un cache partagé. Il faut dire que les caches dédiés sont souvent d'une taille assez faible comparé à un gros cache partagé, conçu pour répondre aux besoins de plusieurs cœurs.
Avantages et inconvénients des caches partagés
Mais l'organisation à base de caches partagés a aussi des avantages :
- Deux programmes peuvent se partager le cache dynamiquement : ils peuvent ainsi se répartir l'occupation du cache d'une manière bien plus souple que ce qui est permis avec un cache dédié ;
- L’implémentation de mécanismes de cohérence des caches est facilitée ;
- Elle évite de répliquer des données partagées entre plusieurs threads. Avec l'organisation en caches dédiés, une donnée utilisée par deux threads lancés sur deux cœurs différents doit être présente dans chacun des caches dédiés. Avec un cache partagé, la donnée est présente en une seule fois dans le cache partagé.
Toutefois, quelques inconvénients des caches partagés sont à signaler :
- Un cache partagé doit avoir une bande passante suffisante pour alimenter plusieurs cœurs, ce qui se fait souvent au détriment de sa latence ;
- Un cache partagé doit pouvoir permettre à plusieurs cœurs d’accéder à des données différentes dans le cache simultanément, afin d'éviter de mettre un cœur en attente pendant un accès au cache. Conséquence : ces caches sont des mémoires multiports, ce qui a un impact sur leur consommation énergétique, leur latence, et leur débit binaire ;
- Leur grande taille a un impact négatif sur leur latence et leur consommation énergétique ;
- Plusieurs programmes peuvent se marcher sur les pieds dans leur répartition de la mémoire cache. Ce phénomène est rare, mais pas impossible.
Dans la réalité, compte tenu de ces contraintes, tous les caches du processeur ne sont pas partagés. Ceux qui ont besoin d'une faible latence (cache L1) sont des caches dédiés, tandis que les autres sont partagés (L2, L3).
Atouts
Avant l’apparition des processeurs multicœurs, les constructeurs de processeurs augmentaient la puissance de leurs produits en élevant la fréquence de calcul de leurs processeurs monocœurs. Mais cette méthode a fini par atteindre ses limites. En effet, l'augmentation de fréquence d’un processeur cause rapidement des problèmes de surchauffe, le refroidissement à air (ventilateur) n'étant plus suffisant. Pour lutter contre cette surchauffe, il faut passer à un refroidissement par eau délicat et onéreux, ou bien passer à des ventilations de plus grande taille et vitesse, créatrices de nuisances sonores. D'autre part le besoin croissant en énergie des microprocesseurs était problématique notamment pour les ordinateurs portables.
L'autre problème est la vitesse de propagation des signaux ainsi que leur fréquence de fonctionnement, limitée respectivement par la vitesse de la lumière et par les effets de bord à haute fréquence (le bruit et le signal commençant à se mêler). Les processeurs monocœurs les plus puissants utilisés dans les ordinateurs de grande distribution ont des fréquences ne dépassant pas en général, les 3 à 4 GHz, car au-delà la température devient trop importante. Dans les salons de technologie, des processeurs sont sur-cadencés grâce au refroidissement à l'azote liquide (température négative).
C’est pour contourner cette limite que les constructeurs se sont tournés vers la fragmentation des puces. Il existait déjà des ordinateurs fonctionnant avec plusieurs processeurs distincts (par exemple, les supercalculateurs). L’idée ici est de reproduire ce parallélisme au sein d’un unique processeur : en bref, introduire plusieurs unités de calcul dans un même processeur. Le principe est simple : plutôt que d’avoir un processeur « simple » à fréquence élevée, on utilise par exemple deux cœurs, de fréquence moitié moindre. On obtient alors un processeur théoriquement de même puissance, mais de fréquence d’horloge plus basse, et de consommation électrique réduite. Le processeur ne rencontre pas les problèmes d’alimentation et de surchauffe de son homologue monocœur : la puissance dissipée double quand on double les cœurs, alors qu'elle serait quadruplée si on doublait la fréquence d'horloge.
En plus de ces avantages purement techniques, il s’avère que ces microprocesseurs sont également bien plus efficaces dans le traitement multitâche. Sur les systèmes mono-cœurs, le système d'exploitation change régulièrement le programme en cours d’exécution pour passer d'un programme à un autre. Ces changements sont très rapides, et ne sont donc pas visibles par l’utilisateur, qui a l'impression que plusieurs programmes s’exécutent en même temps. Sur les systèmes multi-cœurs, si plusieurs applications sont exécutées simultanément sur l’ordinateur, celui-ci peut dès lors répartir ce travail entre les cœurs de processeurs, plutôt que d’effectuer les opérations en alternance sur un seul processeur.
La notion d'affinité processeur (processor affinity) permet de lier une application ou la gestion d'un périphérique à un cœur donné pour obtenir une meilleure réactivité (clavier, souris...). Cela permet de limiter des ralentissements d'exécution dû à un trop grand nombre de migration d'une tâche entre les cœurs, qui implique des reprises de contextes d'exécution coûteux en temps d'accès mémoire.
Contraintes logicielles
Malheureusement, cette approche comporte quelques désavantages, puisque les programmes doivent être repensés pour pouvoir exploiter pleinement les caractéristiques de ces processeurs. En effet, les composants d’un processeur multicœur ont une puissance individuelle inférieure à celle d’un processeur monocœur classique ; un logiciel non adapté au multicœur et qui ne saura donc effectuer ses différents calculs qu’à l’aide d’un seul des cœurs du processeur sera par conséquent exécuté à une vitesse moindre.
En 2006, très peu de logiciels gèrent le bi-cœurs, et globalement les logiciels ne sont pas conçus pour tirer le maximum de cette technologie (excepté dans le monde GNU/Linux où les applications sont portées en très grande majorité — près de 99,8 % — sous plusieurs types d’architectures). Une fois effectuée une mise à niveau de tous les programmes vers la nouvelle architecture, les performances se sont nettement améliorées dans les applications gourmandes telles que les jeux vidéo.
Ces mises à jour touchent également les systèmes d’exploitation, qui peuvent diviser par eux-mêmes les calculs effectués par les logiciels qu’ils exécutent. La technique multicœur est alors utilisable même avec des logiciels non adaptés à ce type de traitement, cette utilisation étant cependant moins performante que si le logiciel indique lui-même comment doivent se diviser les calculs. De telles adaptations sont nécessaires à chaque augmentation du nombre de cœurs dans les processeurs. Ce n’est que lorsque celles-ci ont été effectuées que les nouveaux processeurs peuvent être exploités à plein potentiel.
L'industrie des télécommunications a été l’un des premiers à adopter les processeurs multi-cœurs, aussi bien pour la couche d’acheminement des données que pour la couche de commande. Depuis, ces MPU sont en train de remplacer rapidement les processeurs réseaux (NP) qui étaient basés sur des architectures privées à base de microcode et de picocode. 6WIND (en) a été la première société à fournir du logiciel réseau embarqué optimisé pour ces architectures multi-cœurs.
La programmation parallèle bénéficie également du passage à plusieurs cœurs. Des modèles de programmation comme OpenMP, MPI ou OpenHMPP peuvent être utilisés sur ces plates-formes multi-cœurs. D’autres efforts de recherche sont également menés, par exemple le système Sieve de l'éditeur Codeplay (en), les langages Chapel de Cray, Fortress de Sun et X10 d’IBM.
Exemples commerciaux
- (en) 6WINDGate. Plan donné et plan de contrôle embarqué parallèle de 6WIND pour les processeurs réseaux multi-cœurs
- (fr) National Instruments. Tutoriel sur les principes fondamentaux de la programmation multi-cœur
Notes et références
- Intel présente son premier dual core cette semaine, article rédigé le 7 février 2005.
- Pourquoi Intel et AMD se convertissent aux puces double cœur.
- « Le CEA-Leti présente un processeur à 96 cœurs ! », sur www.tomshardware.fr, (consulté le )
- (en) « 96-Core Processor Made of Chiplets », sur spectrum.ieee.org, (consulté le )