Klein Heidelberg
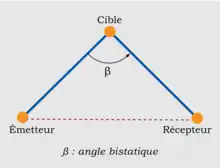
Le Klein Heidelberg (KH) était un système radar passif, déployé par les Allemands pendant la Seconde Guerre mondiale, utilisant les signaux diffusés par le système britannique Chain Home comme émetteur et une série de six stations situées le long de la côte ouest de l’Europe continentale comme récepteurs passifs. Dans la terminologie moderne, le système était un radar bistatique. Comme le système n'envoyait aucun signal, les alliés n'étaient pas au courant de sa présence et n'ont appris son existence que bien après la débarquement de Normandie même certains auteurs disputent cela[1]. Le système est appelé Klein Heidelberg Parasit ou Heidelberg Gerät dans certaines références[2].
Histoire
Les grandes antennes de Chain Home (CH) pouvaient être vues depuis la côte française, ce qui voulait dire que les Allemands étaient conscients de leur emplacement précis. Grâce à leurs émissions en direction fixe vers le continent, il était facile de déterminer quel signal était diffusé par quelle station. Cela fut facilité par la façon dont les stations ont réparti leurs émissions dans une série de créneaux horaires, connus sous le nom de "running rabbits", qui permettaient de retracer une impulsion jusqu'à une station particulière grâce à son minutage[3].
À partir de 1942, le Dr Wächter de Telefunken, en collaboration avec des ingénieurs radio du Reichspost, utilisa ces informations pour créer un radar passif utilisant les émissions de la CH et leurs propres récepteurs[4] - [5]. Cela ressemblait beaucoup à la configuration expérimentale de Daventry qui avait été utilisée pour la première fois pour démontrer le concept de radar au Royaume-Uni au début de 1935. Dans les deux cas, les émissions d'une station distante étaient utilisées comme signal et, lorsqu'un avion passait dans le signal, une partie du signal de celle-ci était renvoyé vers le récepteur, créant un « blip » distinct sur l'écran[6].
À ce concept de base, Wächter a ajouté la possibilité de mesurer l'azimut approximatif de la cible en faisant pivoter toute l'antenne et en recherchant le signal maximal. La longueur d'onde relativement longue du CH, environ 6 mètres, nécessitait de très grandes antennes de réception et des systèmes d'antenne assez complexes pour permettre cette rotation. Un autre effet secondaire de la longueur d’onde longue était que la résolution angulaire était relativement basse et qu’un système de commutation de lobe était envisagé, mais il n’a apparemment jamais été utilisé en service[7].
Plusieurs systèmes furent testés à Cherbourg en 1942 et 1943. Le premier système opérationnel fut construit à la station de brouillage Nachtfalter (papillon de nuit) à Mont de Couple entre Boulogne-sur-Mer et Calais, de l'autre côté de la Manche par rapport à Douvres. Il est devenu opérationnel vers la fin de l'année 1943[8]. Une deuxième station à Oostvoorne aux Pays-Bas (Biber) a suivi au printemps 1944 et 4 stations supplémentaires furent achevées en 1944, Vaudricourt (Skorpion), Ostende (Bremse), Cap d'Antifer (Auerhahn) et Cherbourg (Tausendfüssler). Celles-ci étaient construites sur des antennes radar Wassermann et utilisaient parfois les propres signaux du Wassermann pour les tâches de détermination de la hauteur[9].
Description

Le système utilisait deux antennes : une très grande antenne sur une plate-forme tournante utilisée pour recevoir le signal réfléchi par l'avion et une antenne beaucoup plus petite positionnée à environ 60 mètres de distance et recevant le signal directement de la station CH[7]. Les signaux des deux antennes étaient envoyés à deux écrans cathodiques, développés pour les radars Würzburg, comme affichage J. Cela signifie que la détection de la cible apparaissait comme un signal sur le pourtour circulaire du tube cathodique. La distance de la cible était mesurée par l'angle formé par ce signal avec une origine de référence, au moyen d'une échelle graduée (de 0 à 400 millisecondes) autour de l'extérieur du tube[10] - [11].
L’opérateur sélectionnait d’abord une seule station CH en modifiant une minuterie afin de ne capter que les signaux de cette station. Les stations CH diffusaient sur des plages horaires successives, il était donc facile de sélectionner une seule station à l’aide d’une simple minuterie. Le signal de la plus petite antenne était envoyé à l’écran de gauche. En utilisant une manette ajustant le minuteur, l’opérateur pouvait trouver le maximum du signal principal directement reçu à la position 12 heures[7] - [10].
Le tube cathodique de droite montrait le signal reçu sur l’antenne la plus grande. Le signal direct de la station CH étant très puissant, il apparaît sur cet écran quelle que soit la direction prise par l’antenne. L’affichage était réglé de sorte qu’il ne montre que 1⁄20 de la tranche horaire de 1⁄25 seconde, c’est-à-dire 2 millisecondes. L'opérateur ajustait ensuite davantage la synchronisation afin que le signal direct soit également à la position 12 heures sur cet affichage[7] - [10].
Lorsqu'un avion volait devant la plus grande antenne, une partie du signal CH était réfléchie vers le récepteur. Étant donné que l’appareil n’était pas sur une ligne directe entre les deux stations, la distance totale parcourue par le signal jusqu’à l’avion puis vers l’antenne était toujours plus longue que le signal direct (même dans le cas d'une ligne directe émetteur CH-récepteur KH, l'altitude de l'appareil causait une distance additionnelle). Ceci correspondait à une différence de temps de réception avec le signal directement reçu par la plus petite antenne. La mesure de la différence d'angle sur les deux écrans J correspondait donc à la différence entre le temps d'arrivée du signal de l'avion et celle du signal direct, exprimée en temps écoulé[10].
Pour toute différence de temps écoulé, il existe un nombre infini d'emplacements correspondant à ce délai. Une fois tracés, ces points forment une ellipse avec la station CH sur l'un des foyers et le récepteur KH sur l'autre[10]. Pour faciliter le repérage de ces emplacements, chaque groupe de dix chiffres sur l'échelle circulaire, par exemple 100 à 110, était attribué à une ellipse pré-calculée. Les opérateurs sélectionnaient ensuite cette ellipse sur un ensemble de graphiques fournis[12].
Pour mesurer l'angle par rapport à la cible, l'antenne la plus grande était tournée autour de son axe vertical jusqu'à ce que le « blip » de cible sélectionné soit maximisé ou disparaisse alternativement. L'angle pouvait alors être lu sur une échelle graduée liée mécaniquement à la rotation de l'antenne. Les cartes montraient l'ellipse et l'emplacement de la station KH : une ligne tracée vers l'extérieur de l'emplacement de la station à l'angle mesuré intersectait éventuellement l'ellipse, localisant l'aéronef[12].
Le créneau horaire de 2 ms correspond à une portée de 300 km, mais le système était capable de recevoir des signaux sur des aéronefs volant à haute altitude à une portée encore plus grande. Dans ces cas, l'opérateur pouvait utiliser les commandes de la minuterie pour retarder davantage le balayage sur le deuxième tube cathodique afin qu'il affiche des temps ultérieurs, en ajoutant ce délai supplémentaire fixe à l'angle mesuré pour rechercher l'ellipse correcte sur les graphiques. Cela leur a permis de faire le suivi alors que l'avion survolait l'Allemagne[7] - [10].
Les estimations varient quant à l'efficacité du système. Pritchard donne une précision de 1 à 2 km avec une précision de 1 degré à 400 km[13], alors que Price suggère une distance de 9,7 km à 450 km[10]. Compte tenu de l'absence de commutation des lobes, la précision de l'angle était de l'ordre de 10 degrés (+ ou -5 degrés)[7].
Références
- Pritchard 1989, p. 124
- (de) Markus Scholz, « Augen in Nacht und Sturm - Die Entwicklung der Funkmeßtechnik », sur www.geschichtsspuren.de (consulté le ).
- (en) B. T. Neale, « CH - The First Operational Radar », The GEC Journal of Research, vol. 3, no 2, , p. 74 (lire en ligne).
- Willis et Griffiths 2007, p. 16
- Galati 2015, p. 112
- Gough 1993, p. 3
- von Gregor 1945, p. 2
- von Gregor 1945, p. 1
- Willis et Griffiths 2010, p. 17
- Willis et Griffiths 2007, p. 16-17
- Christian Wolff et Pierre Vaillant, « Affichage de type J », sur Radartutorial.eu, (consulté le ).
- (en) Arthur Bauer, « Klein-Heidelberg, a quite mysterious bi-static radar system », .
- Pritchard 1989, p. 123
Bibliographie
- (en) Gaspare Galati, 100 Years of Radar, Springer, , 399 p. (ISBN 978-3-319-00584-3, présentation en ligne).
- (de) K. von Gregor, Das Funkmeβverfahren "Klein-Heidelberg", Bundesarchiv, coll. « BAMA - RL2 V-96 », .
- (en) David Pritchard, The Radar War : Germany's Pioneering Achievement, 1904–45, Patrick Stephens Limited, Wellingborough, UK, , 240 p. (ISBN 1-85260-246-5).
- (en) Nicholas Willis et Hugh Griffiths, Advances in Bistatic Radar, SciTech Publishing, , 493 p. (ISBN 978-1-891121-48-7, lire en ligne).
- (en) Nicholas Willis et Hugh Griffiths, Klein Heidelberg – a WW2 bistatic radar system that was decades ahead of its time, , 52 p. (présentation en ligne, lire en ligne [PDF])
- (en) Jack Gough, Watching the skies : a history of ground radar for the air defence of the United Kingdom by the Royal Air Force from 1946 to 1975, Her Majesty's Stationery Office, , 328 p. (ISBN 0-11-772723-7).