Cycloconvertisseur
Un cycloconvertisseur est un montage de l'électronique de puissance qui réalise une conversion directe alternatif/alternatif. C'est-à-dire qu'il peut changer la fréquence du signal en sortie.
Caractéristique
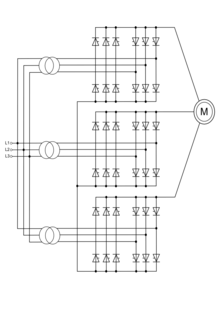
C'est une forme de convertisseur matriciel (c'est-à-dire que pour N phases à l'entrée et P phases à la sortie, il faut NxP interrupteurs bidirectionnels). Ces interrupteurs bidirectionnels sont une association de deux thyristors (en anti-parallèle), ou un triac, dont la commutation au blocage se fait de manière naturelle avec le passage par zéro du courant qui les traverse, ou bien un ou deux IGBTs ou RIGBT.
On peut aussi réaliser ce schéma avec des interrupteurs bidirectionnels bicommandables (à base de transistor ou de thyristor GTO), mais le terme cycloconvertisseur est réservé à ceux utilisant des thyristors.
Généralement, l'amplitude et la fréquence de la tension d'entrée sont fixes, tandis que celles de la tension de sortie sont variables (mais ce n'est pas obligatoire).
Contrairement aux convertisseurs indirects (redresseurs-onduleurs), un cycloconvertisseur à thyristors ne peut fabriquer qu'une fréquence inférieure à celle de l'entrée. Cependant, la mise en place d'un convertisseur matriciel à "interrupteurs" évolués permet d'obtenir un gain entre 0 et l'infini (théorique), identiquement à un montage buck-boost.
Il existe en fait deux sortes de convertisseurs matriciels (cycloconvertisseurs) : les convertisseurs directs (matrice 3x3) et indirects qui comme pour les onduleurs classiques transforment l'alternatif en continu et le continu en alternatif.
Application
Ce montage n'est plus que rarement utilisé, en particulier à cause de la mauvaise qualité des formes d'ondes obtenues, sauf pour les très fortes puissances (quelques dizaines de mégawatts et au-delà), où son faible coût fait oublier ses inconvénients.Par contre, l'utilisation de convertisseurs matriciels est en pleine expansion, notamment dans l'aéronautique du fait de la compacité du montage.
La gamme de puissance concurrentielle des cycloconvertisseur normalisés va de quelques mégawatts à plusieurs dizaines de mégawatts. Les cycloconvertisseur sont utilisés pour l'entraînement des treuils de mine, des moteurs principaux de laminoir et des moteurs à courant continu[2],moulins à billes pour le traitement des minerais, fours à ciment, systèmes de propulsion des navires[3],moteurs à induction à rotor bobiné à récupération de puissance par glissement et production d'électricité à 400 Hz pour les avions[4]. La sortie à fréquence variable d'un cycloconvertisseur peut être réduite pratiquement à zéro. Cela signifie que de très gros moteurs peuvent être démarrés à pleine charge à des révolutions très lentes et être amenés progressivement à pleine vitesse. C'est un avantage inestimable pour les moulins à billes, par exemple, qui permet de démarrer à pleine charge plutôt que de devoir démarrer le moulin avec un baril vide puis de le charger progressivement à pleine capacité. Un "démarrage dur" à pleine charge pour un tel équipement reviendrait essentiellement à appliquer la pleine puissance à un moteur calé. La vitesse variable et l'inversion sont essentielles pour des processus tels que les aciéries de laminage à chaud. Auparavant, on utilisait des machines à courant continu contrôlées par SCR, qui nécessitaient un entretien régulier des balais et du collecteur et offraient un rendement inférieur. Les moteurs synchrones entraînés par des cycloconvertisseurs nécessitent moins de maintenance et offrent une fiabilité et un rendement supérieurs. Les cycloconvertisseurs à pont monophasé ont également été largement utilisés dans les applications de traction électrique pour produire, par exemple, du courant à 25 Hz aux États-Unis et à 16 2/3 Hz en Europe[5] - [6].
En revanche, les convertisseurs à commande de phase, y compris les cycloconvertisseurs, sont progressivement remplacés par des convertisseurs PWM plus rapides et autocontrôlés, basés sur des IGBT, GTO, IGCT et autres dispositifs de commutation, mais ces anciens convertisseurs classiques sont toujours utilisés dans la partie supérieure de la plage de puissance nominale de ces applications[1].
Harmonique
Le fonctionnement du cycloconvertisseur crée des harmoniques de courant et de tension a l'entrée et la sortie du cycloconvertisseur . Les harmoniques de la ligne de courant alternatif sont créées à l'entrée du cycloconvertisseur conformément à l'équation,
- fh = f1 (kq±1) ± 6nfo[7].
où
- fh = fréquence harmonique imposé sur la ligne courant alternatif
- k et n = entiers
- q = nombre d'impulsions (6, 12 . . .)
- fo = féquence de sortie du cycloconvertisseur
- Le premier terme représente les composantes harmoniques du convertisseur du nombre d'impulsions à partir d'une configuration à six impulsions.
- Le deuxième terme de l'équation désigne les fréquences caractéristiques de la bande latérale du convertisseur, y compris les interharmoniques et les sous-harmoniques associées.
Notes et Références
- (en) Bimal K. Bose, Power Electronics and Motor Drives : Advances and Trends, Amsterdam, Academic, , 936 p. (ISBN 978-0-12-088405-6), p. 126
- Marcus Watzmann Watzmann et Raskowetz, Steffen, « Chinese rolling mill for extra high grade aluminium strip », ABB Industrietechnik AG, sep–oct 1996 (lire en ligne [archive du ], consulté le )
- Risto Pakaste et al., « Experience with Azipod propulsion systems on board marine vessels », ABB Azipod Oy, (lire en ligne [archive du ], consulté le )
- Bose (2006), p. 119
- G.T. Heydt et Chu, R.F., « The power quality impact of cycloconverter control strategies », IEEE Transactions on Power Delivery, vol. 20, no 2, , p. 1711–1718 (DOI 10.1109/tpwrd.2004.834350)
- ACS 6000c, « Cycloconverter application for high performance speed and torque control of 1 to 27 MW synchronous motors » [archive du ] (consulté le )
- IEEE Std 519, « IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems », IEEE Std 519-1992, IEEE, , p. 25 (DOI 10.1109/IEEESTD.1993.114370)
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Cycloconverter » (voir la liste des auteurs).