Circuit asynchrone
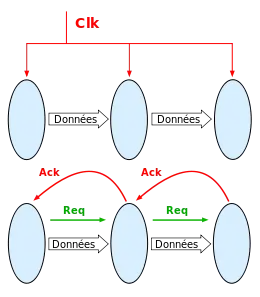
Un circuit asynchrone est un circuit électronique numérique qui n'utilise pas de signal d'horloge global pour synchroniser ses différents éléments. À la place, ces derniers communiquent souvent localement en indiquant l'envoi et la réception de données. On parle parfois de « circuit auto-séquencé ».
Ils sont envisagés comme une alternative possible aux circuits synchrones, plus répandus, particulièrement pour diminuer la consommation d'énergie, puisqu'une horloge reste active en permanence. L'absence d'horloge peut apporter d'autres avantages, comme une vitesse accrue, une conception facilitée et une plus grande fiabilité.
En 2012, malgré ces nombreux atouts et bien qu'ils aient vu le jour presque en même temps que les circuits synchrones, de tels circuits restent minoritaires. Par exemple, la plupart des processeurs fabriqués sont synchronisés par une ou plusieurs horloges, tant sur le marché embarqué que pour les processeurs les plus performants, bien que l'on commence à voir apparaître des microcontrôleurs asynchrones.
Histoire
L'histoire des circuits asynchrones est jalonnée de nombreuses réalisations majeures, la création d'ordinateurs ou de processeurs complets constituant une étape marquante. Elles ne doivent pas faire oublier néanmoins les avancées théoriques et, récemment, le développement d'outils de synthèse et de vérification qu'elles ont permis.
Tout comme dans les autres branches de l'électronique numérique, la recherche continue encore bien que le concept ait été exprimé dès les années 1950. Certains chercheurs présagent l'utilisation généralisée de techniques asynchrones[1], mais de telles prédictions[2] n'ont pas été réalisées par le passé.
Les débuts : circuits indépendants de la vitesse et automates finis
La théorie des circuits asynchrones débute avec les travaux de David A. Huffman sur l'implémentation d'automates finis en 1953[2]. Le concept de « circuit asynchrone » tel qu'il est aujourd'hui, construit de manière modulaire en utilisant un protocole de communication entre les éléments, remonte à la fin des années 1950, quand les circuits « indépendants de la vitesse » reposant sur un protocole double-rail trois états sont introduits par David Muller[3] : son équipe construit l'ILLIAC I en 1952 et l'ILLIAC II en 1962[4]. Cependant, l'utilisation de ce type de circuits est alors jugée complexe : il n'y a pas de méthode simple permettant de réaliser de tels circuits, alors que les automates finis fournissent un modèle adapté[2].
Durant les années 1960 et 1970, quelques circuits asynchrones voient le jour, dont les « macromodules », composants asynchrones qui sont assemblés pour créer des systèmes complexes[5] : l'interface asynchrone permet de ne se soucier que de problèmes logiques.
L'essor des micropipelines et les premiers microprocesseurs
La fin des années 1980 et le début des années 1990 connaissent un regain d'intérêt pour les techniques asynchrones[6], attribuable sans doute aux travaux d'Ivan Sutherland[7] et d'Alain Martin[8].
En 1989, Ivan Sutherland introduit le concept de micropipeline[9], implémentation[10] du protocole deux-phases à données groupées. Celui-ci est ensuite sans cesse amélioré, grâce à d'autres implémentations ou à l'utilisation de protocoles à quatre phases.
Cette période voit également l'apparition du premier microprocesseur asynchrone[11], le Caltech Asynchronous Microprocessor conçu à Caltech par l'équipe d'Alain Martin en 1989. Il utilise des circuits quasi-insensibles aux délais (QDI) générés à partir de code CHP[note 1] et possède une architecture RISC[12].
Il est suivi par les différentes versions de l'AMULET, basées sur les micropipelines, qui reprennent l'architecture ARM. La deuxième version introduit les micropipelines à quatre phases[13]. Un autre microprocesseur QDI de Caltech, le MiniMIPS, considéré comme particulièrement performant[14] - [15], est conçu et testé à la fin des années 1990. D'autres sont conçus dans des universités de par le monde comme le TITAC 1 en 1994, le TITAC 2 en 1997 (architecture RISC, modèle proche du modèle QDI)[16] ou l'Aspro (RISC et QDI), en 2001 à Grenoble[17].
En parallèle, de nouvelles méthodes apparaissent : le codage quatre-états, plus efficace que les autres codages double-rail deux-phases, est inventé indépendamment par deux équipes en 1991 et 1992[18] ; les différents pipelines QDI apparaissent et sont utilisés dans les microprocesseurs ; des pipelines potentiellement plus efficaces, faisant des hypothèses temporelles, sont proposés[19].
Les premières recherches en entreprise et les exploitations commerciales

À la fin des années 1990, des applications commerciales recommencent à voir le jour : de nombreuses entreprises commencent à utiliser des circuits basés sur une approche asynchrone ou à faire des recherches en ce sens.
Parmi elles, Philips fait figure de précurseur en mettant en œuvre des outils de synthèse de circuits asynchrones utilisant le langage Tangram dès 1995, et ce grâce aux outils de l'entreprise Handshake Solutions[7] ; la société dispose de microcontrôleurs 80C51 asynchrones dès 1998[20], qui sont utilisés dans plusieurs systèmes, dont des pagers et des cartes à puces[21].
Des chercheurs de Sun Microsystems, Intel et IBM prennent aussi part à cet engouement[7] : de 1995 à 1999, Intel conduit des recherches pour créer un décodeur pour le jeu d'instruction x86, RAPPID[5], tandis que les laboratoires de Sun sont à l'origine de plusieurs techniques, dont les pipelines de type GasP et une architecture pour processeur asynchrone, le counterflow pipeline[5] - [22], qui n'a jamais été implémentée.
Enfin, de nombreuses start-ups exploitent les avantages de ces circuits, comme Theseus Logic dès 1996[note 2], Fulcrum en 2000[7], ou plus tard Tiempo[23], ou encore GreenArrays.
Les méthodes de synthèse et d'optimisation se sont aussi beaucoup améliorées, en particulier la synthèse à partir d'une spécification sous forme de réseau de Petri, menant à des outils comme Petrify[24]. D'autres pistes sont explorées : outre la compilation à partir de langages comme CHP ou Tangram citée plus haut, des outils visent la synthèse pour des modèles de délais bornés, comme Minimalist[25].
Des avancées récentes
La recherche autour des circuits asynchrones se poursuit durant les années 2000 : de nouvelles implémentations de pipelines sont proposées tant multi-rails, comme LP2/1 en 2000[26], qu'à données groupées, comme IPCMOS en 2000[27] ou MOUSETRAP en 2007[28] ; les protocoles dits « single-track », utilisant un même fil pour la requête et l'acquittement, apparaissent[29], avec des implémentations comme STFB[30] et GasP[31].
En 2004, Epson crée un microcontrôleur flexible, qui est le premier du genre à être asynchrone[32].
Caractéristiques
Les circuits asynchrones possèdent plusieurs propriétés potentiellement intéressantes[33] : ils sont particulièrement prometteurs dans des domaines où la fiabilité est requise et pour des circuits à basse consommation, voire pour leur vitesse, bien qu'aucune méthode de conception ne possède tous ces avantages simultanément : il existe de très nombreuses façons de les concevoir, chacune avec ses avantages et ses problèmes.
Consommation d'énergie
Un signal d'horloge change d'état en permanence[note 3] : il peut représenter une part importante de la consommation d'un circuit[34]. A contrario, les circuits asynchrones ne sont actifs que lorsque des données sont disponibles. Dans le cas contraire, aucun transistor ne commute et la seule puissance consommée est due à leurs courants de fuite[note 4], ce qui en fait des candidats crédibles pour des circuits à basse consommation, ou lorsque la charge de travail évolue rapidement[34]. Cependant, pour assurer la communication entre les éléments, ils utilisent aussi plus de transistors et plus de fils pour une même quantité de données que leurs équivalents synchrones, ce qui peut diminuer les gains énergétiques et augmenter la taille des puces.
Certains circuits ont néanmoins montré des gains substantiels, avec une efficacité énergétique quatre fois supérieure à un équivalent synchrone pour une implémentation de microcontrôleur 80C51[20], ou proche des autres processeurs ARM du moment pour les processeurs AMULET.
Fiabilité
Selon la méthodologie de conception employée, il est possible de créer des circuits utilisant peu d'hypothèses temporelles (insensibles ou quasi-insensibles aux délais par exemple) : ces circuits ont un comportement correct même si les propriétés physiques du circuit évoluent (à cause de la température[35], de la tension d'alimentation[36] ou d'un changement de technologie de fabrication)[37].
Les circuits asynchrones sont sensibles à tous les changements d'états des fils, et non à des signaux stabilisés échantillonnés lors de commutations de l'horloge[38] : on parle d'« aléas » pour désigner les variations indésirables des signaux[note 5] - [39]. De tels problèmes sont à prendre en compte à la conception[40]. Cela leur donne aussi des comportements différents des circuits synchrones en cas d'erreurs ou de parasites. De plus, les protocoles asynchrones font des suppositions sur le comportement des circuits (principalement sur les délais) qui peuvent être infirmées par exemple par des variations de taille et de performance des transistors[41].
La conception d'un circuit synchrone demande quant à elle une connaissance précise des délais des portes, mais un délai trop élevé peut être compensé par une diminution de la fréquence d'horloge[25], au prix d'une baisse de la vitesse globale du circuit toutefois. Un autre problème récurrent est le phénomène de gigue d'horloge, et en général le problème de la distribution du signal d'horloge dans les circuits, qui compliquent la montée en fréquence et dont la correction nécessite l'utilisation de techniques complexes, parfois énergivores[42].
Vitesse
En électronique numérique, la vitesse peut être caractérisée de deux manières différentes[43] - [note 6] - [44] : la latence, qui correspond au temps que met une donnée pour être traitée par le circuit, et le débit, qui est le nombre de données traitées par unité de temps.
Les circuits permettant de passer des données d'un élément à l'autre peuvent introduire une latence supplémentaire pour traiter les signaux de requête et d'acquittement, diminuant le débit et augmentant la latence.
Par contre, la latence comme le débit ne sont pas limités par un signal d'horloge global, et ne sont pas forcément constants selon les parties du circuit ou les données en entrée. Par exemple, pour des circuits logiques tels que les additionneurs[45] - [46], certaines implémentations asynchrones peuvent renvoyer le résultat dès qu'il est calculé (ici, la retenue), alors qu'un circuit synchrone doit toujours attendre jusqu'au signal d'horloge suivant (qui doit être suffisamment tard pour que les calculs soient terminés même dans le pire des cas). Ils permettent donc de bonnes implémentations en temps moyen de calcul, bien que le pire des cas puisse être bien plus long[47].
Certains microprocesseurs asynchrones fabriqués exhibent ainsi de très bonnes performances, la vitesse du MiniMIPS étant environ égale à quatre fois celle de processeurs équivalents pour une efficacité énergétique proche[15].
Simplicité de conception
Il est facile d'utiliser ensemble des circuits asynchrones différents (même utilisant des protocoles différents, en ajoutant un élément traduisant de l'un à l'autre), car aucun élément n'a besoin d'être commun, au contraire de l'horloge des circuits synchrones. Il est même possible de les interfacer avec des circuits synchrones, et d'interfacer des circuits synchrones entre eux par des liaisons asynchrones[48] - [note 7]. Cette modularité est un avantage pour l'interfaçage avec d'autres éléments[49] - [50], mais aussi pour la conception en général, qui s'en trouve facilitée[50] et peut être faite avec des langages de haut niveau.
L'absence d'une horloge unique et donc d'une base de temps globale simplifie grandement le processus, en évitant de devoir prendre en compte les délais et la distribution du signal d'horloge à toutes les échelles lors de la phase de conception[51], mais elle introduit d'autres problèmes qui doivent être pris en compte par les outils ou par le concepteur.
Émissions électromagnétiques
Du fait que les différents éléments ne sont pas synchronisés, les émissions électromagnétiques sont réduites tandis que la consommation électrique est lissée[52] : cela peut être exploité pour se prémunir de certaines attaques exploitant celles-ci[53], car il est alors plus difficile de déduire l'activité du circuit à partir de ses émissions ou de sa consommation. Cette propriété peut être exploitée dans tout environnement où les émissions électromagnétiques doivent être minimisées[52], par exemple au voisinage d'une antenne.
Un circuit synchrone, a contrario, a tendance à émettre des ondes harmoniques de sa fréquence d'horloge et à présenter des pics de puissance consommée à chaque front d'horloge[52].
Pipelines élastiques
Comme les synchronisations entre éléments se font au niveau local, les pipelines asynchrones sont naturellement élastiques[54], c'est-à-dire qu'ils peuvent contenir un nombre variable de données. C'est une conséquence du fait que celles-ci se propagent indépendamment de celles qui les suivent.
Traitements non-déterministes
L'absence de base de temps globale permet de traiter facilement des événements extérieurs[55]. Un tel événement peut survenir au plus mauvais moment, par exemple en même temps qu'un signal d'horloge ou que l'arrivée de données, ce qui peut entraîner l'apparition d'un état métastable dont on s'accommode difficilement en électronique synchrone[55]. Pour des circuits asynchrones, en revanche, il existe des portes spécialisées permettant de réaliser un « arbitrage »[note 8] - [56] : il est possible d'attendre jusqu'à ce que l'état métastable soit résolu[55].
Protocoles de communication
Il existe de nombreux moyens de réaliser une interface asynchrone entre deux éléments[57]. Dans une communication à sens unique impliquant un émetteur et un destinataire, l'envoi des données est signalé par une requête, notée « Req », et leur réception par un acquittement, noté « Ack » : on parle d'une « poignée de main » pour désigner cet échange. Un envoi se déroule comme suit : lorsque ses données sont prêtes, l'émetteur les copie en sortie et en informe le destinataire via une requête ; quand celui-ci les a transmises, copiées ou utilisées, il renvoie un acquittement pour signifier qu'il n'en a plus besoin. L'émetteur peut alors envoyer de nouvelles données[58].
La requête et l'acquittement ne sont pas forcément des signaux à part ; ils peuvent être codés chacun sur un fil, mais ce n'est pas une nécessité : différents codages existent.
Protocoles
On distingue deux familles de protocoles[58] selon la façon dont les événements, tels que les requêtes et les acquittements, sont codés :
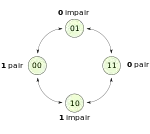
- soit ils correspondent à une transition quelconque, c'est-à-dire un changement de valeur sur un fil, de 1 à 0 ou de 0 à 1. On parle de protocole à deux phases, de « half-handshake », de « transition signalling » ou de codage NRZ (Non-return-to-zero) : l'émetteur envoie les données et émet une requête, que le destinataire traite avant d'envoyer l'acquittement.
- soit l’émetteur et le destinataire remettent les signaux de requête et d'acquittement à leur état initial après avoir signalé la transmission et la réception des données par des transitions. On parle de protocole à quatre phases, de « full-handshake » ou de codage RZ (Return-to-zero) : après l'envoi des données et de la requête, puis leur réception et l'acquittement, l'émetteur ramène le signal de requête à son état initial, puis le destinataire fait de même avec le signal d'acquittement. Malgré une apparente complexité, ce protocole permet des implémentations souvent plus simples et rapides que le protocole à deux phases[13].
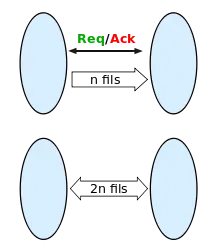
Les protocoles varient ensuite selon les signaux utilisés. Très fréquemment, la requête est codée sur les mêmes fils que les données, ce qui donne les codages sur plusieurs fils présentés dans la section suivante. Certains protocoles, moins répandus, n'ont pas de fil séparé pour l'acquittement et utilisent un ou des fils sur lesquels l'émetteur comme le destinataire peuvent agir[note 9] - [30] - [31] : de cette manière, il n'y a que deux phases (envoi, puis remise à zéro après réception), et moins de fils de communication. D'autres protocoles ont été proposés : basé sur des impulsions, c'est-à-dire une remise à zéro précoce des fils[59], ou supprimant les bascules[note 10] - [60], voire utilisant des signaux non binaires, avec plus de deux tensions signifiantes[18].
Codage des données
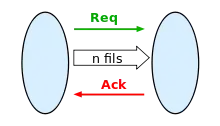
Dans les circuits asynchrones, il existe de nombreux moyens de coder les données. Le codage le plus évident, similaire à celui des circuits synchrones, utilise un fil pour un bit[note 11] ; en asynchrone, on l'appelle « codage à données groupées »[61]. Cependant, comme toute transmission de données asynchrone s'accompagne d'une requête permettant de la signaler, une autre technique est de coder ensemble les données et la requête, comme dans les codages « double-rail », sur deux fils, qui sont très utilisés.
Codage à données groupées
Dans ce protocole, un ou plusieurs fils transportent les données, avec un fil par bit. Un fil (Req) est destiné à la requête de l'émetteur indiquant que les données sont prêtes, et un autre (Ack) à la réponse du destinataire. De tels circuits sont conçus en utilisant un modèle où certains délais sont considérés comme bornés, car sinon les données pourraient ne pas être valides alors même que la requête serait arrivée[61].
On parle souvent de micropipelines pour désigner les circuits utilisant ce codage, avec soit deux soit quatre[13] phases. À l'origine, ce terme fait référence à un pipeline asynchrone utilisant un protocole deux-phases données-groupées[9].
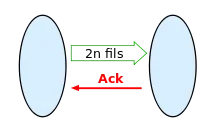
Codage sur plusieurs fils

Ici, il n'y a pas de fil séparé destiné à l'envoi de la requête, qui est implicite[note 12] - [62]. De manière générale, il existe des codages complexes dits « m parmi n », dont on n'utilise surtout qu'un cas particulier dit « double rail », avec deux fils. Dans ces codages, une donnée est représentée par m transitions parmi n fils, et le destinataire peut considérer que les données sont valides dès lors que m transitions ont eu lieu, ce qui rend le codage lui-même insensible aux délais[63] - [64] - [note 13]. Un tel codage est approprié tant pour un protocole à quatre phases, où on remet tous les fils à leur état initial après chaque échange, que pour un protocole à deux phases.
Le type le plus simple de codage m parmi n est le codage 1 parmi n, dit aussi « one-hot » : dans ce cas, il y a n transitions possible, ce qui permet de représenter un chiffre en base n, le cas particulier du double-rail donnant une écriture binaire. Bien sûr, d'autres codages sont possibles[64], mais peu usités, comme les autres codages m parmi n.
Les protocoles double-rail one-hot sont largement répandus[note 14] - [63]. Le protocole à quatre phases, aussi dit « codage trois-états », est le plus populaire[61]. Il comporte une valeur invalide (typiquement 00), et deux valeurs signifiantes (01 codant 0 et 10 codant 1 par exemple), l'état 11 étant inutilisé. L'émetteur repasse par l'état invalide à chaque envoi de données. Pour signifier que le destinataire a remarqué le changement de valeur, une réponse est émise à chaque fois, y compris au passage par l'état invalide, ce qui permet au signal d'acquittement de revenir aussi à son état initial. Dans le protocole à deux phases, une seule transition a lieu à chaque envoi, et elle est acquittée par une seule transition également[65].
Enfin, un autre codage double rail existe, destiné à un protocole à deux phases : tous les états sont signifiants, mais deux codes correspondent à chaque valeur d'un bit, ce qui permet bien de changer d'état à chaque nouvelle donnée ; on parle de codage quatre-états[note 15] - [18].
Conception de circuits asynchrones
Hypothèses sur les délais
Les circuits asynchrones regroupent en fait plusieurs classes de circuits[66] ayant des propriétés différentes, selon les hypothèses faites à la conception. En effet, la communication locale des circuits asynchrones peut permettre de s'affranchir de certaines contraintes de temps, les éléments indiquant eux-mêmes la disponibilité des données. Ces propriétés s'échelonnent de l'insensibilité aux délais (on parle de circuits DI), où le circuit est correct quels que soient les délais des portes et des fils, au modèle des délais bornés, où les délais ont une limite connue. Deux classes de circuits intermédiaires sont utilisées : quasi-insensibles aux délais (QDI) et indépendants de la vitesse (SI).
Pour simplifier, ces modèles considèrent les signaux comme booléens[67], les portes et les fils apportant juste un retard de propagation. En réalité, les délais sont parfois plus complexes que de simples retards[note 16], les signaux sont en réalité des tensions et non des valeurs binaires[note 17], et les portes elles-mêmes sont souvent implémentées en utilisant un modèle de délais bornés.
Circuits insensibles aux délais
De tels circuits fonctionnent correctement quels que soient les délais dans les fils et les portes. Ils ne sont cependant pas réalisables avec des portes logiques simples (les seules portes logiques à une sortie utilisables sont les portes C et l'inverseur)[68], et ne sont donc pas souvent utilisés en pratique. Ce modèle est cependant utilisable avec des portes plus complexes, elles-mêmes implémentées suivant d'autres hypothèses.
Circuits quasi-insensibles aux délais
Les circuits quasi-insensibles aux délais (QDI) ajoutent l'hypothèse, pour la conception, qu'il est possible d'obtenir des « fourches isochrones », c'est-à-dire une séparation d'un fil en plusieurs possédant exactement le même délai, supposition qui est généralement considérée comme réalisable en pratique[note 18], mais présente certains risques, car les délais des fils peuvent être longs en comparaison de ceux des portes avec les techniques CMOS[note 19] - [69], et car la propagation des signaux est plus complexe que de simples délais sur des signaux binaires. C'est pourtant un modèle de conception largement utilisé, car de tels circuits sont Turing-complets[67].
Circuits indépendants de la vitesse
On peut aussi considérer les délais dans les fils comme étant négligeables. Cela se vérifie difficilement dans les systèmes actuels[70], c'est pourquoi on peut leur préférer des circuits conçus comme quasi-insensibles aux délais. Cependant, les deux hypothèses sont en fait très proches[70], le cas indépendant de la vitesse revenant à considérer toutes les fourches comme isochrones. Malgré ce défaut apparent, cette hypothèse de conception est donc très répandue[note 20].
Circuits à délais bornés
Comme l'indique leur nom, les délais dans les portes et les fils sont supposés connus ou bornés par une durée connue. On les appelle parfois circuits de Huffman. C'est le principe de conception en électronique synchrone, où les impulsions d'horloge se font à intervalle suffisamment long pour que les signaux se soient propagés et stabilisés dans tout le circuit. En électronique asynchrone, ce modèle est aussi utilisé, tout d'abord pour concevoir la structure interne de nombreuses portes complexes vues comme des automates finis[71], mais également dans les micropipelines[note 21] - [72], ou pour obtenir des circuits particulièrement performants[note 22].
On distingue parfois les micropipelines des autres circuits à délais bornés, en les définissant comme des circuits possédant une partie de contrôle insensible aux délais envoyant les signaux d'acquittement et de requêtes, et des bascules de mémorisation construites selon un modèle de délais bornés[73], ce qui en fait une méthode de conception à part entière. Selon cette définition, les micropipelines ne regroupent donc pas tous les circuits utilisant un protocole à données groupées, car les structures de contrôle peuvent être aussi à délais bornés.
Aléas
Une différence majeure entre les conceptions synchrone et asynchrone est la prise en compte des aléas logiques. Un aléa est une transition non désirée sur un fil. Dans un circuit synchrone, les aléas sont sans conséquences puisqu'on ne considère que des signaux stabilisés au moment des fronts d'horloge ; ce n'est plus le cas en asynchrone, et un aléa peut conduire à un blocage du circuit ou une erreur.
Les aléas peuvent apparaitre à la suite d'une mauvaise décomposition du circuit en portes logiques : les portes et les fils ayant des délais, les différences de temps de propagation entre signaux peuvent conduire le circuit à osciller. C'est aussi possible pour certains changements simultanés des entrées. Enfin, la cause peut être physique, en particulier la diaphonie, qui devient plus critique avec les progrès de la miniaturisation.
Automatisation de la conception et langages
On peut concevoir un circuit asynchrone soit par compilation de langages de haut niveau[74] soit par une description de son comportement, par exemple à partir de réseaux de Petri[75] - [76].
Différentes méthodologies et outils de synthèse ont été développés[77], tant dans le milieu académique (Balsa[78], « Caltech »[79], Minimalist[80] - [81], Petrify[82]) que dans l'industrie (Tangram[83], Null Convention Logic[84] - [85]). Cependant, le manque d'outils de synthèse et de vérification aussi complets que ceux destinés à l'électronique synchrone reste un des freins majeurs à l'adoption de méthodologies asynchrones.
Synthèse par traduction ou compilation
De nombreuses méthodologies de conception partent d'un langage de haut niveau qui est soit compilé, soit directement traduit en un circuit. De cette manière, la conception est relativement intuitive, et il est possible de construire un système complexe par assemblage de briques de base. Parmi ces langages, beaucoup sont dérivés de CSP, qui reflète bien la concurrence : Tangram a été développé dans ce but chez Philips, Balsa à l'université de Manchester, CHP à Caltech[86]. On peut aussi utiliser des langages de description matérielle plus classiques, comme Verilog ou VHDL, qui n'y sont pas spécifiquement destinés[87].
Synthèse à partir d'une spécification
D'autres méthodes de synthèse existent, basées elles sur une description du comportement du circuit. Elles permettent d'obtenir des circuits efficaces[88], mais au prix d'une conception plus complexe, tant du point de vue du programmeur que de celui de la complexité algorithmique[89]. La spécification se fait sous forme de graphe : soit un réseau de Petri ou un réseau de Petri simplifié appelé graphe de transitions de signaux (STG), soit un automate fini (ASM)[88].
Selon les outils, le circuit généré sera indépendant de la vitesse ou à délais bornés[89]. En plus de ces contraintes temporelles, une limitation courante est une restriction du nombre d'entrées qui sont autorisées à changer simultanément. On dit que le circuit fonctionne en « mode fondamental » si les entrées ne changent que lorsque le circuit a atteint un état stable[90] - [91], et en « mode entrée-sortie » si elles peuvent changer dès que le circuit a répondu par un changement d'état[91].
Vérification, analyse des performances et optimisation
Il est nécessaire d'être capable de vérifier que le circuit se comporte comme prévu : cela passe par une série de vérifications avant et après la production : il s'agit d'éviter d'une part les problèmes dus à des erreurs lors de la phase de conception, ce qui peut être fait par des preuves formelles et des simulations, et d'autre part ceux dus à des défauts lors de la fabrication qui peuvent rendre certains circuits fabriqués incorrects[44]. Pour ces derniers, il faut élaborer de nouveaux protocoles de test applicables aux circuits produits, avec des algorithmes spécifiques aux circuits asynchrones.
L'optimisation des circuits asynchrones a donné lieu à de nombreuses recherches. Leurs propriétés sont très différentes des circuits synchrones : ils rendent impossibles certaines optimisations classiques, qui peuvent introduire des incertitudes temporelles[note 23] et des aléas, mais l'analyse des performances est aussi complètement différente[44] - [92] du fait de l'absence d'un rythme commun : les éléments ont des délais variables et interagissent de manière complexe. L'optimisation, généralement apportée par l'outil de conception, utilise plusieurs transformations[92] à différents niveaux : au-delà du choix de la technologie, il est possible d'optimiser à un niveau « abstrait » (changement de codage des données, ajout d'étages de pipelines, etc.) aussi bien qu'à un niveau local (remplacement de groupes de portes par des groupes équivalents). Ce processus est automatisé, et peut recourir à des simulations pour évaluer les performances d'un circuit.
Problèmes liés à la conception
La conception de circuits asynchrones souffre d'un manque d'outils dédiés[93], les principaux langages de description de matériels ciblant la conception de circuits synchrones, bien qu'il soit possible de les utiliser en électronique asynchrone.
Une autre limitation tient à la formation, qui est généralement focalisée sur l'électronique synchrone, l'électronique asynchrone étant moins répandue[94] et souvent vue comme moins efficace ou plus complexe[12].
Enfin, les problèmes de fiabilités dus entre autres à des contraintes temporelles sont aussi présents dans les circuits asynchrones[69], et peuvent être particulièrement graves puisque les temps de propagation ne sont pas réglables comme avec une horloge[95]. Ils sont surtout présents dans des circuits faisant beaucoup d'hypothèses temporelles (comme le modèle de délais bornés), mais existent aussi avec des modèles introduisant une certaine insensibilité aux délais[69] ; du fait des imperfections des techniques de fabrication, ils ne peuvent être évités que par des simulations en premier lieu, puis des tests après production[44].
Choix techniques et leurs conséquences
De nombreux critères entrent en ligne de compte pour évaluer les différents types de circuits asynchrones : leur vitesse en termes de latence et de débit, leur taille et leur consommation, mais aussi leur fiabilité. Ces caractéristiques varient beaucoup selon le protocole utilisé et l'implémentation choisie, mais aussi les techniques de fabrication et les optimisations appliquées au circuit. Cette section donne donc seulement un aperçu de l'impact de certains choix sur le circuit.
Deux ou quatre phases ?
Les protocoles à deux et à quatre phases ont chacun leurs avantages. À priori, les protocoles à deux phases impliquent moins de transitions, et devraient donc être plus rapides et plus économes. En pratique, cependant, un passage par un protocole à quatre phases est réalisé à un moment ou à un autre : c'est entre autres le cas de l'implémentation d'origine des micropipelines. De plus, il est plus simple d'implémenter les protocoles à quatre phases et leur nombre restreint d'états possibles[65], particulièrement lorsqu'il faut effectuer des calculs en multi-rail.
De fait, les deux protocoles ont été utilisés pour le codage données-groupées. Par contre, les protocoles sur plusieurs rails utilisés sont plutôt de type retour à zéro[65], sauf lorsque la communication se fait sur de longs fils, donc avec des délais et une consommation plus importants, et qu'il devient intéressant de restreindre le nombre de transitions[65], comme dans le cas de liens série[96].
Données groupées et multi-rail
La première différence tient au nombre de fils utilisés : les protocoles à données groupées n'utilisent qu'un fil par bit, plus la requête et l'acquittement, alors que les protocoles multi-rails en utilisent plusieurs. Cela rend ces derniers moins adaptés à l'envoi de nombreux bits ; par contre, ils permettent de créer des circuits QDI, plus robustes ; ils ont aussi l'avantage d'inclure la requête dans les données, ce qui permet directement la création de portes à complétion anticipée, renvoyant les résultats sans attendre que toutes les données d'entrée soient disponibles[97] - [46] - [note 24] (par exemple une porte ou si une entrée vaut 1) ; de tels pipelines « à grains fins », avec une requête par bit, autorisent l'envoi séparé de chaque partie du résultat.
Les circuits à données groupées sont censés consommer moins et occuper moins de place[98] ; on peut y réutiliser[note 25] des portes issues de la logique combinatoire, comme pour les circuits synchrones ; il est alors nécessaire d'adapter le délai imposé au signal de requête aux délais des portes[note 26], soit par un choix de délai à partir des opérandes, soit par une détection de fin de calcul à partir de la consommation du circuit. En termes de fréquence pure, ils se comportent en général légèrement mieux[27], mais cela n'est pas forcément représentatif de la réalité, où des calculs complexes sont réalisés avec des pipelines non linéaires. On constate ainsi que les microprocesseurs asynchrones les plus performants, comme le MiniMIPS, ont utilisé des protocoles multi-rails, alors que le 80C51 de Philips[20] et les processeurs AMULET, qui visent une faible consommation, utilisent des protocoles données-groupées.
Parfois, on utilise ensemble les deux types de protocole pour exploiter le mieux possible les avantages de chacun, en choisissant par exemple du double-rail pour les calculs mais du données-groupées pour les interfaces[46].
Données-groupées
Il existe de nombreuses implémentations de protocoles données-groupées : en deux-phases, outre l'implémentation d'origine[9], on en trouve basées sur des bascules D réagissant aux deux fronts d'horloge[99], ou de type MOUSETRAP[28].
Pour les protocoles à quatre phases données-groupées, on peut supprimer certaines dépendances entre les signaux de requête et d'acquittement émis par des étages contigus, lui permettant d'en renvoyer certains plus tôt[100]. On obtient ainsi des structures plus complexes, mais potentiellement plus performantes.
Multi-rail
De même, en multi-rail quatre-phases, on distingue trois types de circuits courants, tous trois QDI : WCHB, PCHB et PCFB[101]. En WCHB, un étage attend la validité (respectivement la remise à zéro) de toutes ses entrées avant de renvoyer une donnée à sa sortie (respectivement de revenir à l'état intermédiaire). Par conséquent, au plus un étage sur deux contiendra réellement des données, d'où le nom de « half-buffer », et surtout la complétion anticipée est impossible[102]. Les protocoles PCHB et PCFB, en vérifiant explicitement la validité des entrées, peuvent renvoyer des données avant l'arrivée de toutes les entrées et permettent une remise à zéro rapide[note 27], sans attendre l'invalidité des entrées[103] - [104]. Le protocole PCFB permet en plus à chaque étage de contenir des données en renvoyant un acquittement dès la remise à zéro des étages précédents : on parle de « full-buffer »[104]. Cependant, la simplicité des circuits de type WCHB les rend parfois plus rapides que les autres[102], tandis que les circuits de type PCFB requièrent plus de porte logiques[105] : le choix n'est donc pas évident.
D'autres types de pipelines sont possibles en utilisant un modèle de délais bornés : avec de la logique à précharge[note 28], comme PS0[19] ou LP2/1[26], ou avec des protocoles « single-track »[30]. Toutefois, bien que plus rapides, ils sont aussi moins fiables du fait de l'ajout d'hypothèses temporelles.
Une particularité des protocoles multi-rail est la possibilité d'utiliser plus de fils pour coder les données grâce à un codage 1 parmi n plutôt que double-rail, diminuant ainsi le nombre de fils qui commutent, ce qui peut diminuer la consommation électrique[106].
Choix des composants et du processus de fabrication
Parmi les propriétés des circuits, beaucoup dépendent des techniques de fabrication, que ce soient le processus de fabrication lui-même ou les bibliothèques de composants utilisées. L'amélioration des possibilités d'intégration due à celle des processus de fabrication, qui est quantifiée par la loi de Moore, permet d'obtenir des circuits électroniques plus compacts et performants. L'optimisation des circuits asynchrones peut aussi passer par le choix de composants adaptés, par l'optimisation du layout, c'est-à-dire de l'agencement des composants sur le circuit intégré, voire par le contrôle des tailles des transistors de manière à adapter au mieux chaque porte à son fan-out[107].
Adaptation dynamique de la tension d'alimentation
Les circuits électroniques consomment d'autant plus que leur tension d'alimentation est élevée. Par conséquent, on cherche à la minimiser pour des circuits à basse consommation. Pour réduire celle-ci sans sacrifier les performances, on peut adapter la tension à la charge de travail du circuit ou à la vitesse désirée[106]. Cette optimisation existe aussi pour des circuits synchrones, mais nécessite conjointement une adaptation de la fréquence d'horloge qui se fait lentement, là où le processus de mise en veille et de sortie de veille d'un circuit asynchrone est extrêmement rapide[106].
Notes et références
Notes
- Proche du langage CSP mais adapté à la description matérielle
- Issue en 1996 de Theseus Research Incorporated, elle-même fondée en 1990 selon la page web de l'entreprise
- Une optimisation pour les circuits synchrones, appelée « clock gating », consiste à l'arrêter ou à le ralentir lorsque le circuit est inactif pour une « longue période ».
- Il s'agit de la distinction entre consommation dite « dynamique » et « statique » : la première, consommation d'un circuit qui change d'état, est due au chargement des fils, aux fuites et aux courts-circuits lors des commutations ; la seconde, consommation d'un circuit stable, n'est due qu'au fait que les transistors ne sont pas parfaits et présentent des fuites, et est généralement bien plus faible
- On classe souvent les aléas selon ce qui les provoque : ils peuvent être combinatoires ou séquentiels, logiques ou dynamiques
- Alors que le temps de cycle est uniforme dans les circuits synchrones, ce n'est pas le cas des circuits asynchrones, et d'autres outils sont nécessaires pour quantifier les performances, par exemple dans le cadre de l'optimisation. C'est le cas pour des circuits formant des boucles, des fourches, ou ayant des délais variables ; dans de tels circuits, le débit et la latence globaux ne sont pas simples à déduire à partir des propriétés locales. On pourra lire les références et le paragraphe de l'article consacré à l'optimisation
- On parle de circuits globalement asynchrones mais localement synchrones
- Le but est d'imposer un ordre entre deux événements potentiellement simultanés, ce qui est impossible en un temps borné ; par exemple, un arbitrage devra choisir quelle entrée sera relayée en premier à une sortie commune
- De tels protocole ont été proposés pour différents codages
- On en trouve différents exemples dans la littérature, bien qu'ils ne possèdent pas toutes les propriétés des autres circuits asynchrones et que de tels wave pipelines soient aussi utilisés en synchrone
- Parfois, pour des raisons de performances ou de fiabilité, on code néanmoins sur deux fils, codant le bit et son complémentaire
- Le fil d'acquittement est présent, sauf protocole particulier
- Ce n'est pas le cas des implémentations ; celles-ci sont souvent quasi-insensibles aux délais, en utilisant une fourche isochrone sur le signal d'acquittement, mais l'interface entre deux éléments sera insensible aux délais
- Ils sont d'ailleurs parfois les seuls cités, comme dans Vivet 2001, p. 10-11
- On appelle aussi ce codage LEDR pour « Level Encoded Dual-Rail »
- Ces modèles ne prennent en compte que des « délais purs », opposés aux « délais inertiels » qui eux considèrent des variations lissées réalistes : les impulsions trop courtes peuvent alors ne pas être transmises, et les transitions ne sont pas instantanées
- Avec tous les effets parasites que cela implique : bruit, oscillations, tensions de seuil des transistors, effets capacitifs, résistifs, propagatifs, etc.
- Du fait que les portes suivant la fourche ont elles-mêmes un délai, ce qui permet de ne le vérifier qu'approximativement. Voir Vivet 2001, p. 23
- D'autant plus avec les progrès de la miniaturisation
- Elle est utilisée par l'outil « Petrify »
- Le circuit opérant la poignée de main est souvent insensible au délai, alors que les bascules sont construites sur un modèle de délais bornés
- C'est le cas de presque tous les circuits simulés dans Shojaee, Gholipour, Nourani 2006
- On cherchera à éviter qu'elles violent les hypothèses d'insensibilité aux délais, par exemple
- On utilise un tel protocole pour la propagation de retenues dans les additionneurs, même si le reste de l'environnement est à données groupées
- Comme par exemple dans les micropipelines
- Bien qu'il soit possible là aussi de créer des portes à complétion anticipée, qui n'ont pas systématiquement un délai pire des cas, en fournissant plusieurs délais possibles ; on trouve de nombreux exemples de telles portes dans la littérature, en particulier pour les additionneurs : voir par exemple Steven Nowick, Kenneth Yun, Peter Berel et Ayoob Dooply, Speculative Completion for the Design of High-Performance Asynchronous Dynamic Adders, (lire en ligne)
- Cette phase de remise à zéro est appelée « précharge »
- Remise à zéro par un signal dit « de précharge » avant chaque calcul
Références
- Par exemple, Alain Martin écrit en 2007 : « An asynchronous approach offers many advantages and is unavoidable in the long run » dans [ppt] Asynchronous Logic : Results and Prospects
- [PDF] (en) Charles L. Seitz, The Early History of Asynchronous Circuits and Systems, (lire en ligne)
- Sparsø, Furber 2001, p. 23
- [PDF] (en) Chris J. Myers, Asynchronous Circuit Design : Lecture 1: Introduction, Preface and Chapter 1 (lire en ligne)
- [PDF] (en) Chris J. Myers, Asynchronous Circuit Design : Lecture 9: Applications (lire en ligne)
- Sparsø, Furber 2001, p. 4
- [PDF] (en) D. A. Edwards et W. B. Tom, The Status of Asynchronous Design in Industry, , 3e éd. (lire en ligne)
- (ps) Nicolas Boullis, Algorithmes de division pour les circuits asynchrones, (lire en ligne)
- [PDF] Dans l'article (en) Ivan E. Sutherland, « Micropipelines », Communications of the ACM, vol. 32, no 6, , p. 19 (lire en ligne)
- Présentation d'un article sur le site de l'IEEE
- Vivet 2001, p. 32
- [PDF] (en) Alain J. Martin, Steven M. Burns, T. K. Lee, Drazen Borkovic et Pieter J. Hazewindus, The Design of an Asynchronous Microprocessor, (lire en ligne)
- [PDF] (en) Stephen B. Furber et Paul Day, Four-Phase Micropipeline Latch Control Circuit (lire en ligne)
- Vivet 2001, p. 34
- (ps) (en) Alain J. Martin, Mika Nyström, Paul Penzes et Catherine Wong, Speed and Energy Performance of an Asynchronous MIPS R3000 Microprocessor, (lire en ligne)
- Vivet 2001, p. 33
- Sujet de la thèse : Vivet 2001
- [PDF] (en) Marco Storto et Roberto Saletti, Time-Multiplexed Dual-Rail Protocol for Low-Power Delay-Insensitive Asynchronous Communication (lire en ligne)
- [PDF] (en) Ted Eugene Williams, Self-timed rings and their application to division, (lire en ligne)Thèse présentée en 1991 en vue de l'obtention d'un doctorat de l'université Stanford
- [PDF] (en) Hans van Gageldonk, An Asynchronous Low-Power 80C51 Microcontroller, (lire en ligne)
- Junko Yoshida, « Philips Gambit: Self-timing's here »
- [PDF] Robert F. Sproull, Ivan E. Sutherland et Charles E. Molnar, Counterflow Pipeline Processor Architecture, (lire en ligne)
- Page de présentation de l'entreprise
- [PDF] Jordi Cortadella, Michael Kishinevsky, Alex Kondratyev, Luciano Lavagno et Alex Yakovlev, Petrify: a tool for manipulating concurrent specifications and synthesis of asynchronous controllers, (lire en ligne)
- Vivet 2001, p. 28
- [PDF] (en) Montek Singh et Steven M. Nowick, High-Throughput Asynchronous Pipelines for Fine-Grain Dynamic Datapaths, (lire en ligne)
- Shojaee, Gholipour, Nourani 2006
- [PDF] (en) Montek Singh et Steven M. Nowick, MOUSETRAP: High-Speed Transition-Signaling Asynchronous Pipelines, (lire en ligne)Publié dans IEEE Transactions on Very Large Scale Integration Systems, volume 15
- Apparemment présenté pour la première fois (en interprétant Dinh-Duc 2003, p. 64) dans (en) Kees van Berkel et Arjan Bink, Single-Track Handshake Signaling with Application to Micropipelines and Handshake Circuits, Non trouvé en accès libre
- [PDF] (en) Marcos Ferretti et Peter A. Beerel, Single-Track Asynchronous Pipeline Templates Using 1-of-N Encoding, University of Southern California, (lire en ligne)
- [PDF] (en) Ivan E. Sutherland et Scott Fairbanks, GasP: A Minimal FIFO Control, Sun Microsystems Laboratories, (lire en ligne)
- Article en français et annonce de presse d'origine
- Ces avantages sont décrits dans de nombreux articles relatifs à l'électronique asynchrone, comme Vivet 2001, p. 16-18,Sparsø, Furber 2001, p. 3-4 et Hauck 1995, p. 1-2
- Vivet 2001, p. 16-18
- La vitesse des circuits asynchrones varie avec la température sans nécessiter de réglage, puisque les délais des portes, et non la fréquence d'une horloge, déterminent leur vitesse ; des circuits insensibles ou quasi-insensibles aux délais toléreront mieux ces variations.
- Comme démontré avec humour sur le premier microprocesseur asynchrone
- Vivet 2001, p. 19-20 et Hauck 1995, p. 2
- Davis et Nowick 1997, p. 13-17
- Dinh-Duc 2003, p. 15-19
- Dinh-Duc 2003, p. 9
- [PDF] Florent Ouchet, Analyse et amélioration de la robustesse des circuits asynchrones QDI, (lire en ligne)Thèse présentée en 2011 en vue de l'obtention d'un doctorat de l'IPG
- Davis et Nowick 1997, p. 3-5
- Vivet 2001, p. 13 et Sparsø, Furber 2001, p. 47, le temps de cycle étant lié au débit (parfois appelé bande passante par traduction de l'anglais « bandwidth »)
- [PDF] (en) Genette D. Gill, Analysis and Optimization for Pipelined Asynchronous Systems, (lire en ligne)Thèse présentée en 2010 en vue de l'obtention d'un doctorat de l'université de Caroline du Nord
- Des additionneurs et des multiplieurs utilisant ce principe sont décrits dans Vivet 2001, p. 159-171 ; c'est une technique largement utilisée pour la propagation des retenues
- [PDF] (en) Ilya Obridko et Ran Ginosar, Minimal Energy Asynchronous Dynamic Adders, Israel Institute of Technology, , 16 p. (lire en ligne)Une version raccourcie de cet article a été acceptée pour publication par la revue IEEE Trans. On VLSI en 2006
- Vivet 2001, p. 14-15
- [PDF] (en) Jens Muttersbach, Thomas Villiger et Wolfgang Fichtner, Practical Design of Globally-Asynchronous Locally-Synchronous Systems, Swiss Federal Institute of Technology (lire en ligne)
- Davis et Nowick 1997, p. 5
- Vivet 2001, p. 20-21
- Vivet 2001, p. 16
- Vivet 2001, p. 18-19
- [PDF] (en) Konrad J. Kulikowski, Ming Su, Alexander Smirnov, Alexander Taubin, Mark G. Karpovsky et Daniel MacDonald, « Delay Insensitive Encoding and Power Analysis: A Balancing Act », ASYNC, IEEE, , p. 116-125 (lire en ligne)
- Vivet 2001, p. 15
- Vivet 2001, p. 15-16
- Sparsø, Furber 2001, p. 77-80
- Dinh-Duc, p. 13
- Vivet 2001, p. 8-10
- [PDF] (en) Mika Nyström, Asynchronous Pulse Logic, California Institute of Technology, (lire en ligne)Thèse présentée en 2001 en vue de l'obtention d'un doctorat de Berkeley
- [PDF] Par exemple (en) T. Feng, B. Jin, J. Wang, N. Park, Y.B. Kim et F. Lombardi, Fault Tolerant Clockless Wave Pipeline Design (lire en ligne) et (en) O. Hauck et S. A. Huss, Asynchronous Wave Pipelines for High Throughput Dynamic Datapaths, Darmstadt University of Technology (lire en ligne)
- Vivet 2001, p. 11
- Vivet 2001, p. 10-11
- Dinh-Duc, p. 11-12
- (ps) (en) Tom Verhoeff, Delay-Insensitive Codes—An Overview, (lire en ligne)
- Vivet 2001, p. 9-10
- Vivet 2001, p. 21-24, Hauck 1995, p. 3-22 et Sparsø, Furber 2001, p. 25
- [PDF] (en) Rajit Manohar et Alain J. Martin, Quasi-delay-insensitive circuits are Turing-complete, (lire en ligne)
- [PDF] (en) Alain J. Martin, The Limitations to Delay Insensitivity in Asynchronous Circuits, , 20 p. (lire en ligne), cité dans Sparsø, Furber 2001, p. 25 et Hauck 1995, p. 13
- [PDF] (en) Kees van Berkel, Beware the isochronic fork, (lire en ligne)Publié dans la revue Integration, the VLSI Journal, volume 13, en Juin 1992
- Vivet 2001, p. 23-24 et Hauck 1995, p. 21-22 ; pour une explication plus poussée, voir l'article (en) « 3D Integration : A Revolution in Design », sur Real World Technologies
- Hauck 1995, p. 3-10
- Hauck 1995, p. 10-11
- Vivet 2001, p. 25-26
- Sparsø, Furber 2001, p. 123, Vivet 2001, p. 43-53
- Dinh-Duc 2003, p. 35-37
- Sparsø, Furber 2001, p. 86-114, Vivet 2001, p. 27-28 et Hauck 1995, p. 22-28
- Dinh-Duc, p. 25-39
- Dinh-Duc, p. 30-31
- Dinh-Duc, p. 31-33
- Dinh-Duc, p. 37-39
- [PDF] (en) Robert M. Fuhrer, Steven M. Nowick, Michael Theobald, Niraj K. Jha, Bill Lin et Luis Plana, MINIMALIST: An Environment for the Synthesis, Verification and Testability of Burst-Mode Asynchronous Machines, (lire en ligne)
- Dinh-Duc, p. 35-37
- Dinh-Duc, p. 29-30
- Dinh-Duc, p. 33-35
- [PDF] (en) Karl M. Fant et Scott A. Brandt, NULL Convention Logic™, Theseus Logic Inc., (lire en ligne)
- Dinh-Duc 2003, p. 26
- Vivet 2001 présente une méthode de conception utilisant une traduction de CHP vers VHDL
- Dinh-Duc 2003, p. 26-27
- Rezzag 2004, p. 30
- [PDF] (en) Raj Kamal, Digital Principles and Design : Chapter 18, Lesson 1: Fundamental Mode Sequential Circuits, (lire en ligne)
- Kishinevsky, Lavagno, Vanbekbergen 1995, p. 29
- [PDF] (en) Steven M. Burns, Performance Analysis and Optimization of Asynchronous Circuits, (lire en ligne), p. 49-55
- (en) Bernard Cole, « Will Self-timed Asynchronous Logic Rescue CPU Design? »,
- Davis et Nowick 1997, p. 2
- Hauck 1995, p. 2
- Vivet 2001, p. 104-106
- [PDF] (en) Charlie Brej, Asynchronous Early Output and Early Acknowledge Dual-Rail Protocols, (lire en ligne)Thèse présentée en 2002 en vue de l'obtention d'un doctorat de l'université de Manchesteret [PDF] (en) Charlie Brej, Early Output Logic and Anti-Tokens, (lire en ligne)Thèse présentée en 2005 en vue de l'obtention d'un doctorat de l'université de Manchester
- Dinh-Duc 2003, p. 64
- [PDF] (en) S. Kaja Mohideen et J. Rajapaul Perinbam, Asynchronous Micropipeline Using an Effective Double Edge Trigerred D Flipflop, (lire en ligne)
- Sparsø, Furber 2001, p. 120
- Vivet 2001, p. 70 et Dinh-Duc 2003, p. 65-68
- Dinh-Duc 2003, p. 65-66
- Dinh-Duc 2003, p. 66-67
- Dinh-Duc 2003, p. 67-68
- Vivet 2001, p. 70
- [PDF] Marc Renaudin, Circuits Asynchrones et Consommation, (lire en ligne)
- [PDF] (en) Ivan E. Sutherland et Jon K. Lexau, Designing Fast Asynchronous Circuits (lire en ligne)
Voir aussi
Bibliographie
- [PDF] Pascal Vivet, Une méthodologie de conception de circuits intégrés quasi-insensibles aux délais : Application à l'étude et à la réalisation d'un processeur RISC 16-bit asynchrone, (lire en ligne)Thèse présentée en 2001 en vue de l'obtention d'un doctorat de l'IPG
- [PDF] Anh-Vu Dinh-Duc, Synthèse automatique de circuits asynchrones QDI, (lire en ligne)Thèse présentée en 2003 en vue de l'obtention d'un doctorat de l'IPG
- [PDF] Amine Rezzag, Synthèse Logique de Circuits Asynchrones Micropipeline, (lire en ligne)Thèse présentée en 2004 en vue de l'obtention d'un doctorat de l'IPG
- [PDF] (en) Michael Kishinevsky, Luciano Lavagno et Peter Vanbekbergen, The Systematic Design of Asynchronous Circuits, (lire en ligne)
- [PDF] (en) Scott Hauck, « Asynchronous Design Methodologies: An Overview », Proceedings of the IEEE, vol. 83, no 1, , p. 69-93 (lire en ligne [archive du ], consulté le )
- [PDF] (en) Al Davis et Steven M. Nowick, An Introduction to Asynchronous Circuit Design, (lire en ligne)Dans l'introduction du document, les auteurs affirment que : « L'intention de cette monographie est de présenter à la fois une introduction au domaine de la conception de circuits numériques asynchrones et un survol de l'état de l'art en 1997. »
- [PDF] (en) Jens Sparsø (dir.) et Steve Furber (dir.), Principles of asynchronous circuit design - A systems perspective, Kluwer Academic Publishers, , 337 p. (lire en ligne [archive du ])Les chapitres 1 à 8, qui sont beaucoup cités, sont aussi publiés indépendamment : [PDF] (en) Jens Sparsø, Asynchronous circuit design : A tutorial, (lire en ligne)
- [PDF] (en) K. Shojaee et M. Gholipour, Comparative study of asynchronous pipeline design methods, (lire en ligne)Simulation des performances de divers pipelines asynchrones, publiée dans IEICE Electronics Express, volume 3, en Avril 2006