XSS-10
XSS-10 est un micro-satellite de l'U.S. Air Force Research Laboratory et le premier de deux satellites développés pour mettre au point des techniques permettant d'inspecter ou d'intervenir sur d'autres engins spatiaux. Placé en orbite en 2003, il a permis de valider dans le cadre d'une mission d'une durée de 24 heures le fonctionnement de plusieurs équipements miniaturisés (caméra, télécoms, centrale à inertie, système de propulsion) et d'un logiciel embarqué dédié. La mission XSS-11, lancée en 2005, a poursuivi les tests effectués avec une instrumentation plus complète et une autonomie fortement accrue.

| Organisation | U.S. Air Force Research Laboratory |
|---|---|
| Domaine | Technologie : manœuvres à proximité d'un satellite |
| Statut | Mission achevée |
| Lancement | 29 janvier 2003 |
| Lanceur | Delta II 7925 |
| Durée | 24 heures |
| Identifiant COSPAR | 2003-005B |
| Masse au lancement | 31 kg |
|---|
| Orbite | basse |
|---|---|
| Périgée | 517 km |
| Apogée | 804 km |
| Inclinaison | 39,75° |
Contexte
XSS-10 est le premier des deux satellites de la série Experimental Spacecraft System développé sous la maitrise de l'U.S. Air Force Research Laboratory (AFRL) dont l'objectif est la mise au point de micro-satellites capables d'effectuer des opérations de service (ravitaillement en ergols,...) ou d'inspection à proximité d'autres satellites de manière semi-autonome. Le programme est lancé en décembre 1997 après l'annulation par le président américain en du projet Clementine II (rendez-vous avec un astéroïde géocroiseur). Le satellite doit initialement être lancé par la Navette spatiale américaine mais la NASA annonce en 1999 qu'elle ne peut prendre en charge le satellite du fait de la priorité accordée à l'assemblage de la Station spatiale internationale. Les responsables du projet optent pour le lancement par une fusée Delta II en tant que charge utile secondaire. Compte tenu de la configuration de lancement, le satellite ne dispose pas de panneaux solaires (sa durée de vie est limitée par la capacité des batteries à 24 heures) ni de système de stockage de données (les données télémétriques ne sont disponibles que lorsqu'une station au sol est en vue)[1].
Objectifs de la mission
Les objectifs de la mission XSS-10 sont de démontrer la capacité d'un système et d'équipements embarqués à effectuer des opérations à proximité d'un autre engin spatial. Les objectifs détaillés sont les suivants[2] :
- Vol libre d'une engin d'environ 25 kg
- Communiquer en temps réel avec le sol via une liaison 2 voies
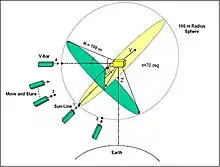
- Manœuvrer autour d'un objet dans l'espace en exploitant les images prises par la caméra embarquée, la maitrise de la position relative et la connaissance de l'attitude et des déplacements de XSS-10
- Se positionner à trois endroits différents pour effectuer une inspection d'un objet dans l'espace en toute autonomie
- Démontrer la capacité du satellite à rester de manière continue dans une position relative fixe par rapport à sa cible
- Détecter et poursuivre un objet situé dans l'espace à l'aide des images fournies par une caméra
Caractéristiques techniques
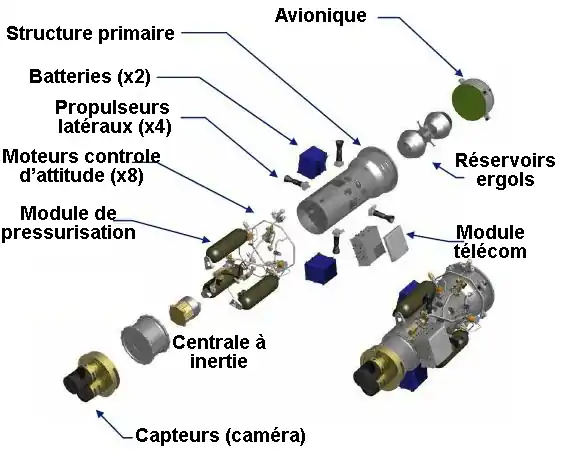
XSS-10 est un satellite de 31 kg au lancement de forme cylindrique long de 81 cm avec un diamètre maximal de 31 cm. L'énergie est fournie par une batterie lithium-ion. Le satellite dispose d'un système de propulsion avancé reposant sur 4 propulseurs brulant un mélange de peroxyde d'azote et monométhylhydrazine (2,58 kg d'ergols embarqués) pour les modifications d'orbite et de 8 propulseurs à gaz froid (0,7 kg d'azote) pour le contrôle d'attitude. Le satellite est monté sur un système d'éjection solidaire du deuxième étage du lanceur Delta II baptisé SPP (Sconce Electronics Platform) qui comprend également une caméra permettant de suivre les mouvements du satellite durant sa mission. Le satellite est construit par l'établissement de Chicago de la société Boeing[3] - [4].
La charge utile comprend les équipements suivants[4]. :
- Le VCS (Visual Camera System) est une caméra comprenant deux optiques et deux capteurs : la première optique est destinée à prendre des images de l'engin spatial autour duquel XSS-10 doit manœuvrer, la seconde optique est utilisée pour réaliser la fonction de viseur d'étoiles. Cet équipement est développé par la société SAIC
- Mini-SGLS (Miniature Space-to-Ground Link Subsystem) est un système de communications miniaturisé. Les communications se font en bande S en passant par le réseau de satellites de télécommunications de l'Armée de l'Air américaine.
- IMU (Inertial Measurement Unit) est une centrale à inertie miniaturisée utilisant des gyroscopes à fibre optique et des accéléromètres en silicium. Il est fourni par la société Litton Industries.
- Le système de propulsion qui permet au satellite de contrôler son orientation et d'effectuer des mouvements de translation brûle un mélange de péroxyde d'azote et de monométhylhydrazine mis sous pression par de l'azote.
Déroulement de la mission

Le , le satellite XSS-10 décolle de la base de Cape Canaveral en tant que charge utile secondaire d'une fusée Delta II 7925 chargée de placer en orbite un satellite GPS. Après avoir bouclé 10 orbites à une altitude de 800 km et avec une inclinaison orbitale de 39,75° l'étage supérieur du lanceur largue le micro-satellite. Celui-ci réalise alors avec succès une série de manœuvres pré-programmées autour de l'étage de fusée durant les périodes où le satellite est en vue de deux stations au sol contiguës. Le test s'achève par une manœuvre destinée à abaisser le périgée à une altitude 531 km pour réduire la durée du séjour du satellite en orbite[5] - [6].
Notes et références
- XSS-10 microsatellite flight demonstration program results, p. 2
- XSS-10 microsatellite flight demonstration program results, p. 3-4
- XSS-10 microsatellite flight demonstration program results, p. 4-5
- (en) « XSS », sur EO Portal, Agence spatiale européenne (consulté le )
- XSS-10 microsatellite flight demonstration program results, p. 7-8
- (en) Gunter Krebs, « XSS 11 », sur Gunter's Space Page (consulté le )
Source
(en) Thomas M. Davis et David Melanson, « XSS-10 microsatellite flight demonstration program results », SPIE, vol. 5419, , p. 31-41 (DOI 10.1117/12.544316, lire en ligne)