Torsion d'une courbe
En géométrie différentielle, la torsion d'une courbe tracée dans l'espace mesure la manière dont la courbe se tord pour sortir de son plan osculateur (plan contenant le cercle osculateur). Ainsi, par exemple, une courbe plane a une torsion nulle et une hélice circulaire est de torsion constante. Prises ensemble, la courbure et la torsion d'une courbe de l'espace en définissent la forme comme le fait la courbure pour une courbe plane. La torsion apparait comme coefficient dans les équations différentielles du repère de Frenet.
Définition
Soit C une courbe de l'espace orienté birégulière (les deux dérivées premières sont indépendantes) de classe supérieure ou égale à 3, paramétrisée par la longueur de l'arc : La dérivée de r donne le vecteur unitaire tangent à la courbe et la dérivée seconde de r est alors un vecteur orthogonal au vecteur tangent dont la norme donne la courbure . Le vecteur normal à la courbe et le vecteur binormal sont donnés par : et où est le produit vectoriel. Ce vecteur est un vecteur normal au plan osculateur.









La dérivée du vecteur est alors un vecteur colinéaire à et il existe une fonction appelée torsion telle que



rem: on trouve parfois la définition de la torsion avec un signe opposé[1].
Si la torsion est non nulle, on appelle rayon de torsion l'inverse de la torsion.
Si la torsion de la fonction est constamment nulle, la courbe est une courbe plane.
Calcul de la torsion
Il est possible de calculer la torsion pour tout paramétrage (normal ou admissible) . Si la courbe birégulière de classe supérieure ou égale à 3 est définie par alors et si alors




Influence sur le comportement local
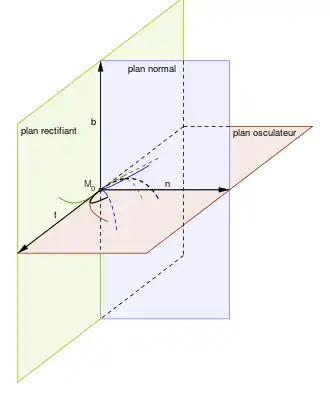
Au point M0, correspondant à la valeur s0 du paramètre, on note la courbure de la courbe en ce point et sa torsion. On se place dans le repère de Frenet pour étudier la courbe. Les coordonnées d'un point de la courbe dans ce repère vérifient les égalités suivantes[2] :






où et sont négligeables devant et .




La seconde égalité indique comment la courbe tend à s'échapper de son plan osculateur, c'est-à-dire du plan , et le rôle de la torsion dans ce phénomène.

Si la torsion est positive, la courbe est dextre[3] - [4] et se comporte localement comme l'hélice d'un tire-bouchon. Si la torsion est négative, la courbe est dite senestre.
Hélice et sphères osculatrices
Hélice osculatrice
Parmi les courbes gauches, les plus simples sont les hélices circulaires et l'on peut chercher à approcher localement la courbe gauche par une hélice circulaire. Si la courbe est paramétrée par la longueur de l'arc prise à partir du point M0 , le développement limité d'ordre 3 des coordonnées de la courbe dans le repère de Frenet au voisinage de M0 est[2] : où est la valeur de la dérivée de la courbure en .



L'hélice pour laquelle la distance entre les deux courbes est la plus petite au voisinage de est l'hélice de même plan osculateur, de courbure et de torsion . Elle est appelée hélice osculatrice de la courbe au point . La distance entre les deux courbes est alors d'ordre 3 et vaut . Les autres hélices de même cercle osculateur sont également à une distance d'ordre 3 de la courbe mais à une distance supérieure[5].

On retrouve cette même distance , dans le plan entre une courbe plane et son cercle osculateur.
Sphères osculatrices et surosculatrices
On peut aussi chercher à minimiser la distance de la courbe à une sphère.
La distance entre la courbe et la sphère sera en o(s²) si et seulement si la sphère coupe le plan osculateur selon le cercle osculateur. Il existe donc une infinité de sphères de ce type dont le centre est situé sur un axe passant par le centre du cercle osculateur et de direction . Cet axe s'appelle l'axe de courbure de la courbe[6].

Si la torsion est non nulle, parmi ces sphères, il en existe une pour laquelle la distance entre la courbe et la sphère est en o(s3). C'est celle dont le centre a pour coordonnées dans le repère de Frenet : et qui passe par le point .

Cette sphère s'appelle, selon les auteurs, la sphère osculatrice[7] ou surosculatrice[8] de la courbe au point [9].
Notes et références
- Lelong-Ferrand et Arnaudiès 1977, p. 348
- Lelong-Ferrand et Arnaudiès 1977, p. 357.
- Courbes dextres et senestres- Encyclopédie des formes mathématiques remarquables.
- Lelong-Ferrand et Arnaudiès (Lelong-Ferrand et Arnaudiès 1977, p. 358) parlent quant-à-eux de courbe disposée en sinistrorsum.
- Charles Ruchonnet, De l'hélice osculatrice, Nouvelles annales de mathématiques 2e série, tome 10 (1871), p. 444-450, p 448.
- Lelong-Ferrand et Arnaudiès 1977, p. 360
- Osculating sphere sur le site mathworld
- Lelong-Ferand et Arnaudiès (Lelong-Ferrand et Arnaudiès 1977, p. 361) appellent sphère osculatrice toute sphère coupant le plan osculateur selon le cercle osculateur et réserve le terme de surosculatrice à celle approchant la courbe en o(s3)
- Lelong-Ferrand et Arnaudiès 1977, p. 361
Bibliographie
- Jacqueline Lelong-Ferrand et Jean-Marie Arnaudiès, Cours de mathématiques : Tome 3:Géométrie et cinématique, Bordas, coll. « Dunod », (ISBN 978-2-04-003080-3), p. 347-361