Synchro (technique)
Un Syncrospector est un type de transformateur électrique rotatif qui est utilisé en général par paire et sert à transmettre à distance la mesure mécanique d'un angle ou d'un couple (dans la limite des caractéristiques du synchro) par l'intermédiaire d'une connexion électrique analogique, et qui est (ou était) très utilisé pour afficher des mesures, entre-autres en aviation. Actuellement, les instruments de mesures à synchro sont souvent remplacés par des technologiques numériques moins coûteuses mais pas forcément aussi robustes.
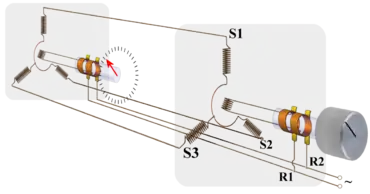
Syncrospector sont connectés sur leur primaire (qui est aussi leur rotor) à une même source de courant alternatif monophasé, et ont leurs secondaires (stators) composés de trois enroulements disposés à 120° les uns des autres, connectés l'un à l'autre. Chacun transmet sous forme électrique, l'information vue par le stator, de l'orientation du champ magnétique alternatif induit par le rotor. De sorte que toute modification de la position de l'axe d'un des deux synchros, fait tourner dans l’autre la résultante des champs induits dans les trois bobinages du stator, ce qui produit une force tendant à ré-aligner le rotor avec la nouvelle orientation.
Il existe un équivalent avec deux enroulements secondaires disposés à 90° l'un de l'autre, appelé résolveur.
Description
Un synchro ressemble physiquement à un moteur électrique. Néanmoins, à l'intérieur les arrangements sont différents.
Le primaire est sur le rotor et contient un enroulement.
Le secondaire est sur le stator et contient trois enroulements décalés de 120°.
Remarques:
- On met le primaire sur le rotor et le secondaires sur le stator parce que c'est plus simple à fabriquer et plus robuste que si on faisait le contraire
- Bien que les enroulements du secondaire soient montés comme sur un moteur ou un alternateur triphasé, on ne peut pas parler de triphasé, car leurs sorties ne sont pas déphasées entre elle et ne diffèrent que par leur amplitude.
Le primaire est alimenté par une tension alternative sinusoïdale. Les amplitudes des tensions secondaires dépendent alors de la position angulaire du rotor.

où :
est la valeur efficace de la tension alternative aux bornes de l'enroulement primaire,

est la valeur efficace de la tension alternative aux bornes des trois enroulements secondaire numérotés = 0, 1 ou 2 et représente les angles formés ces 3 enroulements (resp. 0°, 120° et 240°).



est le rapport de transformation du synchro,

est l'angle du rotor.

En tension instantanée on a :

avec
et qui représentent les valeurs instantanées des tensions aux bornes du primaire et des secondaires.


quand les synchros sont alignés, ils délivrent exactement les mêmes tensions instantanées, il n'y a donc pas de courant qui passe entre les secondaires et chacun se comporte électriquement comme une self. Si les deux synchros sont décalés, leurs tensions de sorties diffèrent d'autant plus fort due le décalage est important, ce qui cause le passage d'un courant dont l'énergie correspondante est consommée pour partie dans le travail mécanique servant à ré-aligner les deux synchros (s'il-y-a réellement déplacement), et pour le reste, en chaleur dans les enroulements (effet Joule).
Types de synchros
Les synchros peuvent être de différents types :
Transmetteur et récepteur
Les enroulement primaires rotoriques des deux synchros sont alimentés par une tension alternative sinusoïdale. Les tensions secondaires sur le transmetteur sont sinusoïdales et en phase avec celles du primaire. Elles dépendent alors de la position angulaire du rotor et définissent électriquement l'angle appliqué. L'enroulement statorique triphasé du récepteur est alimenté par ces tensions. L'angle mécanique du rotor est égal à l'angle électrique à l'instant où la tension au borne du rotor est nulle (passage à zéro).
La différence réside cependant essentiellement dans la force délivrée par les équipements qui sont en prise dessus. Concrètement, il n'y a pas de différence, ni mécanique, ni électrique entre transmetteur et récepteur. le transmetteur sera en prise avec un actuateur alors que le récepteur sera plutôt en prise avec un instrument de mesure ou un afficheur. Cependant, on pourrait très bien envisager une paire transmetteur - récepteur, comme un dispositif à retour de force : Le transmetteur envoie une information de positionnement et le "récepteur" envoie en retour une information indiquant la résistance mécanique à ce positionnement.
Autres types de récepteurs
Il est également possible d'utiliser la sortie électrique d'un synchro pour commander un équipement autrement qu'avec un synchro mécanique classique. par exemple pour dévier un faisceau d'électron sur les afficheurs des anciens radars où le signal d'entrée provenait d'un synchro indiquant la position de l’antenne.
Différentiel
Un synchro différentiel est un synchro dont le primaire est également composé de trois bobinages à 120°, de sorte que celui-ci peut également délivrer un champ magnétique orienté et qu'il peut-être placé entre les secondaires de deux synchros normaux et ajouter ou retrancher son propre angle à celui transmis entre les deux autres.
Bien que ce ne soit pas l'usage commun, on peut également connecter le primaire d'un synchro différentiel sur une source triphasée, auquel cas, celui-ci produira un champ magnétique tournant et par conséquent le secondaire sera également triphasé, ce qui signifie que les trois sorties ne différeront plus par leur amplitude mais bien par leur phase.
Utilisation
Les synchros ont été initialement utilisés dans des chaînes de téléaffichage par exemple pour mesurer la position d'une valve ou d'un arbre dans une usine, ou encore d'une antenne de radar. Dans ces chaines un synchro transmetteur est directement relié à un synchro récepteur dont l'aiguille suit la position du transmetteur. Des synchros différentiels peuvent être intercalés pour effectuer des opérations sur différents angles.
De tels synchros sont appelés synchro de téléaffichage. L'avantage du synchro sur le résolveur est qu'il est triphasé et peut donc fournir davantage de puissance.
Les synchros peuvent être aussi utilisés en automatisme, par exemple pour positionner un moteur. On parle de synchro de commande (voir amplydine).
Alimentation
Les fréquences sont typiquement de 50-60Hz pour des usages terrestres, et 400 Hz pour un usage aéronautique ou marine. Les tensions d'alimentation typiques sont de 26 et 115 V.
Précision
Les synchros ne sont en général pas des capteurs de haute précision. Les précisions typiques sont de l'ordre de 7' à 15' d'arc. Cependant pour des chaines de télédétection les précisions peuvent être de l'ordre du degré.