Polymère électroactif
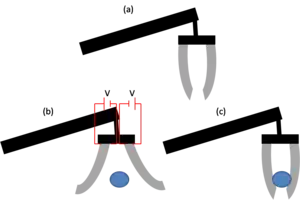
Les polymères électroactifs (PEA) (en anglais : electroactive polymers (EAP)), sont des polymères dont la forme ou la taille changent lorsqu'ils sont stimulés par un champ électrique. L'utilisation principale de ce type de matériau est la fabrication d'actionneurs[1] - [2] et de capteurs[3]. Une propriété intéressante des EAP est qu'ils sont capables de grandes déformations, ainsi que de forces importantes. La plus grande partie des actionneurs actuels est fabriquée à partir de céramiques piézo-électriques. Ces matériaux sont certes capables de produire des forces très élevées, cependant leur domaine de déformation n'excède pas quelques pourcents. Durant les années 1990, il a été démontré que certains EAP sont capables d'une déformation de 380 %[1], ce qui est très grandement supérieur à n'importe quelle céramique utilisée actuellement. Une autre application des EAP est dans le développement de la robotique (robotique molle notamment), dans le développement de muscles artificiels. Le fonctionnement d'une pince en EAP est décrit dans la figure 1.
Historique
L'étude des EAP a commencé dans les années 1880, quand Wilhelm Roentgen créa une expérience dans laquelle il testa l'effet d'un courant électrique sur les propriétés mécaniques d'un élastique[4]. L'élastique était fixé à une extrémité, et il accrocha une masse sur l'autre extrémité. Un champ électrique fut appliqué sur l'élastique pour étudier la variation de sa longueur en fonction du courant électrique appliqué.
Sacerdote approfondit ensuite l'expérience de Roentgen en proposant une théorie sur la réponse de la contrainte de l'élastique en fonction du champ électrique appliqué, théorie formulée en 1899[4]. Ce n'est qu'à partir des années 1925 que le premier polymère piézoélectrique fut découvert (électret). Ce dernier fut formé en combinant de la cire de carnauba, de la colophane, de la cire d'abeille, et en refroidissant le mélange pendant qu'une tension électrique continue lui était appliquée afin de le polariser. Le matériau se solidifia en un polymère présentant des propriétés piézoélectriques.
Les polymères dont les propriétés varient selon d'autres excitations qu'un champ électrique font partie de ce domaine d'étude. En 1949, Katchalsky et al. démontrèrent que des filaments de collagène plongés dans un acide ou dans une solution alcaline présentent un changement significatif de volume[2]. Les filaments de collagène se contractent en solution alcaline et se détendent en solution acide. D'autres stimuli (comme la variation de pH) ont été testés, cependant la recherche s'est plus portée sur les polymères électroactifs car ceux-ci sont les meilleurs prétendants à l'imitation de systèmes biologiques complexes.
Ce n'est qu'à partir des années 1960 que des progrès significatifs sont effectués. En 1969, Kawai fut capable de démontrer que le polyfluorure de vinylidène (PVDF) présente un effet piézoélectrique très important[2]. Cette brillante découverte a permis la recherche de polymères ayant des propriétés similaires à celles du PVDF. En 1977, les premiers polymères conducteurs sont découverts par Hideki Shirakawa et al. [3]. Shirakawa, en collaboration avec Alan MacDiarmid et Alan Heeger démontra que le polyacétylène était conducteur, et qu'en le dopant avec de la vapeur d'iode, il est possible d'augmenter sa conductivité de huit ordres de grandeur. Sa conductivité fut comparable à celle d'un métal. À partir des années 1980, un grand nombre de polymères ayant des propriétés conductrices ou piézoélectriques sont découverts.
Au début des années 1990, les polymères composites métal-ion (IPMC) sont développés et présentent des propriétés électro-actives bien supérieures à celles des premiers EAP. L'avantage principal des IPMC est qu'ils présentent des déformations à la suite d'excitations électriques inférieures à 1 ou 2 V[2].
Types
Polymères électroactifs diélectriques
Les diélectriques sont des matériaux dont les déplacements sont causés par des forces électrostatiques localisées entre deux électrodes. Les élastomères diélectriques sont capables de très grandes déformations et sont dans le principe un condensateur à capacité variable. Cette capacité change lorsqu'ils sont soumis à une tension. Ces types de polymères électroactifs requièrent un champ électrique élevé pour se déformer (de l'ordre de la centaine de volts), mais ne consomment pas beaucoup de puissance électrique. Les diélectriques ne requièrent pas de puissance pour se maintenir à une position donnée.
Polymères ferroélectriques
Les polymères ferroélectriques appartiennent au groupe des polymères cristallins polaires. Ils sont capables de maintenir une polarisation électrique permanente qui peut être inversée ou alternée dans un champ électrique externe[5] - [6]. Les polymères ferroélectriques, tels que le PVDF, sont utilisés dans les transducteurs acoustiques et en tant qu'actionneur électromécanique à cause de leur réponse piézoélectrique intrinsèque. Ils sont aussi utilisés en tant que capteur de chaleur à cause de leur réponse pyroélectrique intrinsèque.
Polymères cristallins liquides
Les chaînes principales des polymères cristallins liquides ont des groupes mésogènes liés les uns aux autres à l'aide de lien flexible. Les mésogènes au sein de la colonne principale forment la structure mésophase causant le polymère à adopter une conformation compatible avec celle de la structure de la mésophase.
Polymères électroactifs ioniques
Les polymères ioniques sont des actionneurs polymère dans lesquels la déformation est causée par le déplacement d'ions vers l'intérieur du polymère. Seulement quelques volts sont nécessaires à l’actionnement, mais le flux d'ions nécessite une puissance électrique plus importante, de plus une énergie électrique est requise pour maintenir ces actionneurs en position.
Composites ioniques métal-polymères IPMC
Les composites métal-polymères sont des actionneurs composés d'un polymère ionique tel que le Nafion ou le Flemion, et dont la surface a été métallisée, d'un conducteur métallique, tel que l'or ou le platine. Sous une tension électrique (1-5 V pour des échantillons de 10 × 40 × 0,2 mm), les ions migrent et sont redistribués, causant un mouvement de flexion. Si les électrodes métallisées sont arrangées dans une configuration asymétrique, tout type de mouvement peut alors être atteint, flexion, torsion etc.
Réseaux interpénétrés de polymères conducteurs IPNC
Les réseaux interpénétrés de polymères sont constitués d'un film support électrolyte pris en sandwich entre deux couches de polymères conducteurs électroniques. Lors de l'actionnement, les ions se déplacent d'une électrode à l'autre via le film support d'électrolyte.
Différences entre polymères ioniques et diélectriques
Les polymères diélectriques sont capables de maintenir leur déplacement induit lorsqu'ils sont soumis à une tension continue[7]. Ce phénomène permet d'envisager l'utilisation de tels polymères dans des applications robotiques. Ces matériaux ont aussi une haute densité énergétique et peuvent opérer dans l'air sans dégradation importante de leurs performances. Entre autres, les polymères diélectriques requièrent un champ électrique très important à leur activation (supérieur à 10 V pour un micromètre déplacé).
Les polymères ioniques quant à eux nécessitent un champ électrique d'activation très moindre, de l'ordre du volt. Cependant ces polymères doivent baigner dans un milieu liquide pour fonctionner. Récemment un nouveau type de polymère ionique a été développé, capable de fonctionner sous atmosphère ambiante[8]. Les polymères ioniques ont aussi un couplage électro-mécanique très faible, ce qui les rend idéaux pour des applications de biomimétiques.
Applications liées aux polymères électroactifs
Micro-fluidique
Les polymères électroactifs ont un important potentiel dans le domaine de la microfluidique, tel que dans des applications d'administration de traitement ou de laboratoire sur puce ou pour la réalisation de micro-pompe[9].
Dispositifs haptiques
Les polymères électroactifs pour afficheur braille ré-actualisable[10] ont émergé récemment. Ils permettent d'aider les non-voyants à la lecture rapide mais peuvent aussi servir d'interface pour un ordinateur.
Optique
Les polymères diélectriques, notamment les piézoélectriques, sont très largement utilisés dans le domaine de l'optique, notamment dans les dispositifs permettant d'ajuster les distances focales de lentilles optiques.
Notes et références
- (en) Bar-Cohen, Yoseph, « Artificial Muscles using Electroactive Polymers (EAP): Capabilities, Challenges and Potential », sur trs-new.jpl.nasa.gov.
- Sofiane Soulimane (2010), Conception et modélisation d'un micro-actionneur à base d'élastomère diélectrique, Micro et nanotechnologies/Microélectronique, université Paul-Sabatier - Toulouse III, 2010.
- T. Wang, M. Farajollahi, Y.S. Choi, I.T. Lin, J.E. Marshall, N.M. Thompson, S. Kar-Narayan, J.D.W. Madden et S.K. Smoukov, « Electroactive polymers for sensing », Interface Focus, (DOI 10.1098/rsfs.2016.0026).
- (en) « Electrochemistry Encyclopedia: Electroactive Polymers (EAP) », sur electrochem.cwru.edu.
- T. Furukawa, « Ferroelectric Properties of Vinylidene Fluoride Copolymers », Phase Transitions, .
- « Ferroelectric Polymers », INC, (ISBN 0824794680).
- Y. Bar-Cohen, Kwang J. Kim, Hyouk Ryeol et John D. W. Madden, « Electroactive Polymer Materials », Smart Materials and Structures, .
- Y. Bar-Cohen, T. Xue, J.O. Simpson et J. Smith, « Ionic Polymer-Metal Composites 5IPMC) As BIomimetic Sensors and Actutators », SPIE, .
- A. Richter, S Klatt, G Paschew et C Klenke, « Micropumps operated by swelling and shrinking of temperature-sensitive hydrogels », Lab Chip, (DOI 10.1039/B810256B).
- Yoseph Bar-Cohen, « Electroactive polymers for refreshable Braille displays », SPIE, .
Liens externes
Bibliographie
- Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R. E. et Sommer-Larsen, P. (Éds.) (2011), Dielectric elastomers as electromechanical transducers: Fundamentals, materials, devices, models and applications of an emerging electroactive polymer technology, Elsevier.
- Dearing, S., Lambert, S. et Morrison, J. (2007), Flow control with active dimples. Aeronautical Journal, 111(1125), 705-714 (résumé).
- Jean-Mistral C. (2008), Récupération d'énergie mécanique par polymères électroactifs pour microsystèmes autonomes communic MAZZOLDI, A., CARPI, F. et DE ROSSI, D. (2004).
- Lyons, M. (Éd.) (2013), Electroactive Polymer Electrochemistry: Part 1: Fundamentals, Springer Science & Business Media.
- Polymers responding to electrical or electrochemical stimuli for linear actuators. Dans Annales de chimie (vol. 29, no 6, p. 55-64), Lavoisier.
- ants] (Doctoral dissertation, université Joseph-Fourier-Grenoble I) (résumé).
- Scrosati, B. (Éd.) (1993), Applications of electroactive polymers, vol. 75, Londres, Chapman & Hall.
- Tixier, M. et Pouget, J. (2015), Équations de conservation et lois de comportement d'un polymère électroactif. S24 Couplages multiphysiques et changements de phase.
- Wallace, G. G., Teasdale, P. R., Spinks, G. M. et Kane-Maguire, L. A. (2008), Conductive electroactive polymers: intelligent polymer systems, CRC Press.
- Wang, T., Farajollahi, M., Choi, Y.S., Lin, I.T., Marshall, J.E., Thompson, N.M., Kar-Narayan, S., Madden, J.D.W., Smoukov, S.K. (2016), Electroactive polymers for sensing, Interface Focus (vol. 6, no 4, p. 1-19), The Royal Society.