Kaikō
Le ROV Kaikō était un véhicule sous-marin téléguidé de recherche océanographique japonais exploité par la Japan Agency for Marine-Earth Science and Technology (JAMSTEC) entre 1995 et 2003.
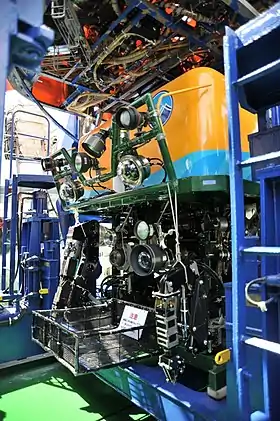
| ROV Kaikō かいこう | |
 Lanceur Kaikō | |
| Type | Véhicule sous-marin téléguidé |
|---|---|
| Histoire | |
| A servi dans | |
| Commanditaire | JAMSTEC |
| Commandé | 1991 |
| Lancement | 1993 |
| Statut | perdu en mer |
| Caractéristiques techniques | |
| Longueur | 3,00 m |
| Maître-bau | 2,00 m |
| Tirant d'eau | 2,60 m |
| Déplacement | 5.5 tonnes |
| Propulsion | 1 moteur électrique (1) propulseur d'étrave (6) |
| Vitesse | 1.5 nœuds |
| Profondeur | 11.000 m (maximum) |
| Carrière | |
| Propriétaire | Japan Agency for Marine-Earth Science and Technology |
Il s’agissait du premier et unique ROV de 11.000 mètres au monde. Après la perte du véhicule lors de l'accident du , pour le remplacer, le Kaikō 7000 a été développé puis transformé en Kaikō 7000-II et Kaikō Mk-IV .
Historique
Le ROV se compose de deux parties, le lanceur et le véhicule. Entre 1995 et 2003, ce premier Kaikō a effectué plus de 250 plongées, rassemblant 350 espèces biologiques (dont 180 bactéries différentes), qui pourrait s’avérer utile dans les applications médicales et industrielles. Le , Kaikō a été perdu en mer au large des côtes de l’île de Shikoku pendant le typhon Chan-Hom, lorsqu'un câble secondaire le reliant à son lanceur s'est rompu.
Le véhicule Kaikō a été mis à niveau plusieurs fois, Kaikō 7000, Kaikō 7000-II et le quatrième actuel Kaikō Mk-IV (2013). Durant cette période, des chercheurs de JAMSTEC ont commencé les essais en mer d'un ROV de remplacement permanent, ABISMO (en) (Automatic Bottom Inspection and Sampling Mobile). ABISMO est actuellement l’un des trois ROV jusqu’à 11.000 mètres (les deux autres étant Nereus de l'Institut océanographique de Woods Hole , et Deepsea Challenger, piloté par James Cameron).
Challenger Deep
En , Kaikō est devenu le deuxième engin à atteindre le fond du Challenger Deep, dans la Fosse des Mariannes, et le premier à visiter ce lieu depuis la mission du Trieste. La profondeur maximale mesurée sur cette plongée était de 10 911,4 mètres, ce qui correspond à la plongée la plus profonde pour un submersible sans équipage à ce jour. Le , Nereus est devenu le troisième engin à visiter le fond du Challenger Deep, atteignant une profondeur maximale enregistrée de 10 902 mètres.
Annexes
Notes et références
- (ja) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en japonais intitulé « かいこう » (voir la liste des auteurs).