Deepsea Challenger
Deepsea Challenger (DCV 1) est un sous-marin de 7,3 m (24 pieds) pour les grandes profondeurs. Il a été conçu pour atteindre le point Challenger Deep, qui est le point le plus profond jamais mesuré dans les océans, situé à plus de 10 900 m sous le niveau de la mer.
L'objectif de plongée profonde en solitaire sur ce site a été atteint le avec Deepsea Challenger piloté par James Cameron, établissant ainsi le record de plongée en sous-marin en solitaire, à 10 898 mètres.
Le record absolu de profondeur est toujours détenu par l'équipage des deux hommes du Trieste, version améliorée du FNRS 2 du Fonds national de la recherche scientifique de Belgique. Ce bathyscaphe de conception italienne et suisse avait plongé à 10 916 m dans la même fosse, le .
Conception

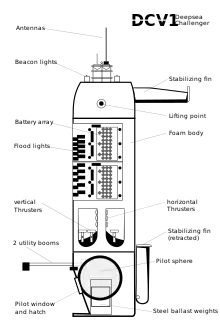
Construit par des ingénieurs australiens de la Acheron Project Pty Ltd à Sydney, l'engin comprend un équipement d'échantillonnage scientifique et des caméras de haute définition en trois dimensions. Deepsea Challenger a été secrètement construit en Australie, en partenariat avec la National Geographic Society et avec le soutien de Rolex, dans le cadre du programme Deepsea Challenge. La construction du submersible a été dirigée par l'ingénieur australien Ron Allum[1]. Plusieurs des membres de l'équipe de développement du submersible sont issus du club de plongée en grotte de Sydney, y compris Allum lui-même avec de nombreuses années d'expérience de plongée en grotte.
Travaillant dans un petit atelier d'ingénierie à Leichhardt, Sydney, Allum a créé de nouveaux matériaux, dont une mousse syntactique structurelle spécialisée appelée Isofloat[1], capable de résister aux énormes forces de compression à une profondeur de 11 kilomètres (6,8 mi). La nouvelle mousse est unique en ce sens qu'elle est plus homogène et possède une plus grande résistance uniforme que les autres mousses syntactiques disponibles sur le marché, mais avec une densité spécifique d'environ 0,7, elle flotte dans l'eau. La mousse est composée de très petites sphères de verre creuses en suspension dans une résine époxy et représente environ 70 % du volume du sous-marin[2].
La résistance de la mousse a permis à Deepsea Challenger d'incorporer des moteurs de propulseur dans l'infrastructure montée dans la mousse, sans l'aide d'un squelette en acier pour monter divers mécanismes. La mousse remplace les réservoirs remplis d'essence pour la flottaison tels qu'utilisés dans le sous-marin historique Bathyscaphe Trieste.
Allum a également apporté de nombreuses innovations nécessaires pour surmonter les limites des produits existants ou alors en cours de développement pour d'autres véhicules de haute mer. Il s'agit notamment de propulseurs à pression équilibrée remplis d'huile, de réseaux d'éclairage à DEL, de nouveaux types de caméras et de câbles de communication à pénétration rapide et fiable permettant des transmissions à travers la coque du submersible. Allum a acquis une grande partie de son expérience en développant notamment les systèmes de communication électronique utilisés dans les plongées pour le film de Cameron Titanic ainsi que pour filmer Ghosts of the Abyss, Bismarck et d'autres[3] - [4].
Les systèmes d'alimentation du sous-marin sont composés de batteries au lithium logées dans la mousse et qui sont clairement visibles sur les photos du navire. Les systèmes de charge des batteries au lithium ont été conçus par Ron Allum. Le submersible contient plus de 180 systèmes embarqués, y compris des batteries, des propulseurs, des systèmes de survie, des caméras 3D et des éclairages à DEL[5]. Ces systèmes interconnectés sont surveillés et contrôlés par un contrôleur d'automatisation programmable (PAC) du fabricant de commandes Opto 22 de Temecula, de Californie. Pendant les plongées, le système de contrôle enregistre également la profondeur, le cap, la température, la pression, l'état de la batterie et d'autres données, et les envoie au navire de soutien toutes les trois minutes via un système de communication acoustique sous-marine développé par la société australienne L-3 Nautronix.
Les éléments structuraux cruciaux, tels que la colonne vertébrale et la sphère pilote qui transportait Cameron, ont été conçus par la société tasmanienne Finite Elements. La conception de l'intérieur de la sphère, y compris l'ignifugation, la gestion de la condensation et le montage des ensembles de contrôle, a été entreprise par le bureau d'études industrielles Design + Industry basé à Sydney.
Spécifications
Le navire comprend une sphère de pilotage de diamètre intérieur de 1,09 m, qui ne peut contenir qu'une personne.
Tests de résistance à la profondeur
La sphère est en acier, sa paroi est épaisse de 6,35 cm, et a été testée deux fois pour une résistance à une pression de 113 800 kPa (soit 1 138 bar), à l'université d'État de Pennsylvanie, dans un réservoir sous pression. Les données enregistrées par les vingt-deux jauges de déformation posées sur la sphère lors des tests indiquent que la sphère est capable de subir une pression égale à 140 % à celle du test sans céder[6].
Résumé des caractéristiques
- Poids : 11,8 t
- Lest : 500 kg d'acier
- Longueur : 7,3 m
- Propulsion : 12 hélices motorisées
- Poste d'équipage : une sphère de pilotage de 1,09 m de diamètre, pour 1 place assise
- Équipements :
- un bras téléguidé par une manette utilisé pour les prélèvements ;
- 8 caméras HD ;
- une caméra sur bras télescopique avec projecteur ;
- un groupe de projecteurs éclairant à 30 m[7].
Expédition Deepsea Challenge
Premières plongées
À la fin janvier 2012, afin de tester les systèmes, James Cameron a passé trois heures dans le navire en submersion juste en dessous de la surface, dans le chantier naval de Sydney[8].
Challenger Deep
Le , après avoir quitté la zone des essais située dans la mer des Salomon relativement calme, le sous-marin était à bord du bateau Mermaid Sapphire, au dock du port Apra, à Guam, pour être réparé et amélioré, tout en attendant une accalmie suffisante pour pouvoir entreprendre la plongée[9] - [10].
Le record
Le , James Cameron a piloté l'engin dans ce but et est devenu la première personne dans l'histoire à l'atteindre en solitaire. Le record enregistré est une profondeur de 10 898 m, à la date du lundi à 7 h 52 heure locale, ou dimanche à 21 h 52 UTC[11] - [12] - [13].
La descente
Le sous-marin a atteint le point le plus profond de l'océan après 2 h 36 de descente à partir de la surface, soit environ 1,2 m/s[14].
L'exploration
Cameron est resté plusieurs heures à proximité du fond. Le record détenu par le Trieste pour une exploration d'une durée de 20 minutes a ainsi été battu.
La remontée
La remontée a duré 70 minutes ; elle fut plus rapide que prévu.
Notes et références
- « Ron Allum », sur www.ronallum.com (consulté le )
- « Hollywood director James Cameron to pilot submarine to the bottom of Mariana Trench - Electronic Products », (version du 17 avril 2012 sur Internet Archive)
- (en-US) « Ron Allum - DEEPSEA CHALLENGE Team », DEEPSEA CHALLENGE, (lire en ligne, consulté le )
- (en) « Movies », The New York Times, (lire en ligne, consulté le )
- (en-US) « DEEPSEA CHALLENGER Systems and Technology », DEEPSEA CHALLENGE, (lire en ligne, consulté le )
- « Deepsea Challenger - Pilot Sphere »
- « Fosse des Mariannes : James Cameron seul à 10 898 mètres de profondeur »
- « Expedition Journal - Jim Takes First Piloted Dive »
- « Expedition Journal - The Mother of All Oceans »
- « Expedition Journal - A Hive of Work Oceans »
- « James Cameron explore le site le plus profond de la planète »
- « James Cameron réussit sa plongée dans la fosse des Mariannes »
- « Challenger Deep : plongée record réussie pour James Cameron »
- « Fosse des Mariannes : James Cameron seul à 10 898 mètres de profondeur »
Voir aussi
- Trieste, le bathyscaphe qui fut le premier à atteindre le fond des mers.
- DeepFlight Challenger (en) en test chez Virgin Oceanic
- Océanographie
- Abysse
- Fosse océanique