Commande directe du couple
La commande directe du couple (Direct torque control / DTC ou direct self-control / DSC en anglais) est une méthode de commande des variateurs de vitesse électrique. Comme son nom l'indique, elle se concentre sur la commande du couple, la vitesse du moteur électrique en découlant indirectement. La méthode estime le flux magnétique et le couple du moteur à partir de la mesure des tensions et des courants alimentant celui-ci. Si le couple ou le flux sortent d'une plage de tolérance prédéfinies, les transistors du variateur de vitesse sont commutés vers l'état suivant de telle manière à revenir dans la plage aussi vite que possible.
Elle a été inventée en 1984. Au départ réservée aux machines asynchrones, des variantes permettent de l'utiliser pour les machines synchrones.
Elle offre de très bonnes performances dynamiques et a une faible fréquence de commutation et donc des pertes faibles. Elle est également très robuste. Elle nécessite toutefois des capteurs de bonne qualité et un contrôleur suffisamment puissant pour pouvoir calculer l'algorithme tous les 10 à 30 µs. Elle est donc relativement coûteuse. Elle concurrence la commande vectorielle.
Principe
Le flux magnétique du stator est estimé en intégrant la tension alimentant le stator. Le couple est estimé en considérant qu'il est le produit du vecteur du flux et du vecteur du courant. Le flux est ensuite comparé à sa consigne. Si le couple ou le flux sortent d'une plage de tolérance prédéfinies, les transistors du variateur de vitesse sont commutés vers l'état suivant de telle manière à revenir dans la plage aussi vite que possible. Il s'agit donc d'une commande par hystérésis.
Un des objectifs de la commande directe du couple est de réduire au maximum la fréquence de commutation de l'onduleur. Un autre est que le fonctionnement n'a pas besoin d'une tension continue constante à l'entrée de l'onduleur. Une capacité de lissage coûteuse est ainsi économisée.
Histoire et applications

La méthode de la commande directe du couple a été brevetée par Manfred Depenbrock, à la fois aux États-Unis[1] et en Allemagne[2]. La demande de brevet date du . Le terme employée pour désigner la méthode est direct self-control (DSC), soit auto-commande directe. En septembre 1984, Isao Takahashi et Toshihiko Noguchi décrivent une méthode similaire sous le nom de direct torque control (DTC), commande directe du couple, dans une publication IEEJ[3] - [4]. L'invention est donc généralement attribuée aux trois chercheurs.
La seule différence entre le DTC et le DSC est la forme du tracé déterminant l'évolution du vecteur de flux, dans la première méthode il est quasiment circulaire, tandis que dans l'autre il forme un hexagone. En conséquence, la fréquence de commutation est plus élevée pour le DTC que pour le DSC. Le premier est donc mieux adapté aux systèmes de faibles et moyennes puissances, tandis que le second convient aux grandes puissances [5].
La méthode est employée à cause de sa grande simplicité et de ses très hautes performances, avec une réponse très rapide en flux et en couple, pour la commande des moteurs asynchrones.
Les premiers produits commerciaux utilisant la méthode sont des systèmes de tractions du groupe ABB, conçus pour équiper les locomotives hybrides DE502 et DE10023[6]. En 1995, la famille de variateurs de vitesse ACS600, qui utilise la méthode, est lancée.
La méthode a été également employée pour la commande des HVDC connectés au réseau électrique haute tension, qui se comporte en première approximation comme une machine tournante[7] - [8]. La méthode peut servir pour les redresseurs et les onduleurs. Le courant délivré a une fondamentale sinusoïdale, le facteur de puissance peut être ajusté à la demande.
La méthode a été étendu aux moteurs synchrones à aimants permanents à la fin des années 1990[9] et à ceux à reluctance dans les années 2010[10]. Elle a aussi été employée pour les machines à double excitation au début des années 2000[11]. La méthode a été améliorée progressivement, par exemple par l'utilisation de la modulation par vecteur spatial, qui permet d'obtenir une fréquence de commutation constante[12].
L'expiration du brevet de Depenbrock au milieu des années 2000 permet à d'autres sociétés qu'ABB d'exploiter la technologie.
Fonctionnement
Un onduleur triphasé en tout ou rien est composé de six transistors (voir image ci-contre), afin d'alimenter chacune des trois phases. À aucun moment, il ne faut que deux interrupteurs en série (par exemple A- et A+) soient fermés simultanément sous peine de court-circuit. En supposant qu'au moins un des interrupteurs en série est toujours fermé, on obtient huit états possibles : six actifs et deux de roue libre, dans lesquels la tension est nulle.
| Vecteur | A+ | B+ | C+ | A− | B− | C− | VAB | VBC | VCA | |
|---|---|---|---|---|---|---|---|---|---|---|
| V0 = {000} | OFF | OFF | OFF | ON | ON | ON | 0 | 0 | 0 | vecteur de roue libre |
| V1 = {100} | ON | OFF | OFF | OFF | ON | ON | +Vdc | 0 | −Vdc | vecteur actif |
| V2 = {110} | ON | ON | OFF | OFF | OFF | ON | 0 | +Vdc | −Vdc | vecteur actif |
| V3 = {010} | OFF | ON | OFF | ON | OFF | ON | −Vdc | +Vdc | 0 | vecteur actif |
| V4 = {011} | OFF | ON | ON | ON | OFF | OFF | −Vdc | 0 | +Vdc | vecteur actif |
| V5 = {001} | OFF | OFF | ON | ON | ON | OFF | 0 | −Vdc | +Vdc | vecteur actif |
| V6 = {101} | ON | OFF | ON | OFF | ON | OFF | +Vdc | −Vdc | 0 | vecteur actif |
| V7 = {111} | ON | ON | ON | OFF | OFF | OFF | 0 | 0 | 0 | vecteur de roue libre |
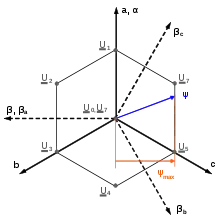
La commande directe du couple cherche à l'aide de ces huit états à maintenir le flux statorique sur une trajectoire prédéfinie. En ajoutant le flux dans une représentation vectorielle des huit états, on obtient l'image ci-contre. La rotation de la tension implique la rotation du flux. Pour rappel, tension et flux sont liés par la loi de Faraday: . Le flux à l'intérieur de la machine tournante est donc déterminé par la commande de la tension. Le couple est défini par la vitesse à laquelle le flux parcourt cette trajectoire. Les deux états de roue libre permettent de régler l'amplitude de la tension alimentant le moteur.

La modulation va donc chercher à commuter la tension en fonction d'une consigne de flux tournante dans un repère alpha-beta. Le fonctionnement est donc similaire à la méthode du vecteur spatial, à la différence que la consigne est un flux et non une tension. Quand la projection du flux sur l'axe β atteint une valeur prédéfini, la tension est commutée à l'état suivant. Le filtre à hystérésis compare ensuite la valeur du flux avec celle de consigne. Il n'y a donc pas de modulateur à fréquence de commutation fixe comme dans la commande vectorielle par exemple.
En parallèle, un autre filtre à hystérésis compare le couple obtenu à celui de consigne. Si le couple est suffisamment proche de sa consigne, un des états de roue libre est activé.
Les transistors sont donc commutés seulement quand le couple ou le flux diffère de leur valeur de consigne. Cela permet de réduire fortement la fréquence de commutation et donc les pertes. La première dépend principalement de la machine tournante. Il est possible d'ajouter un régulateur qui gère la plage de tolérance des filtre à hystérésis en fonction de la fréquence de commutation et ainsi de trouver une commande optimale sans dépasser une fréquence de commutation donnée.
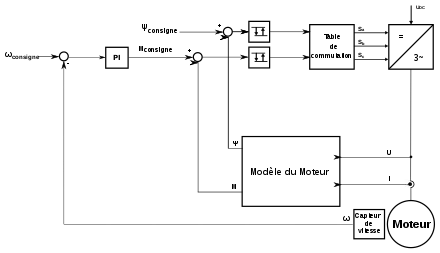
La commande directe du couple dépend fortement de la connaissance du flux et du moment dans la machine. Le modèle mathématique de celle-ci et ses paramètres sont donc indispensables à l'algorithme pour estimer ces deux valeurs en fonction du courant et de la tension.
Plage de vitesse
La commande directe du couple fonctionne correctement sans capteur de vitesse. Cependant, l'estimation du flux est généralement calculée en intégrant la tension alimentant le moteur. À cause, des erreurs dans la mesure de la tension et dans la connaissance de la résistance statorique, cette intégrale a tendance à devenir erronée à basse vitesse. Il n'est pas possible de commander le moteur si la fréquence de sortie du variateur de vitesse est nulle. Une conception adéquate du système de commande permet d'obtenir une fréquence minimale d'environ 0,5 Hz. Cela est suffisant pour démarrer un moteur asynchrone avec le couple maximal à l'arrêt. Une inversion du sens de rotation est également possible à la condition de passer rapidement d'une vitesse positive à une vitesse négative sans rester dans la zone proche de zéro. Si un fonctionnement à basse vitesse est requis, un capteur de vitesse peut être ajouté. Dans ce cas, la commande fonctionne parfaitement sur toute la plage de vitesse.
Vue d'ensemble des stratégies de commande
Différentes stratégies de commande existent pour les variateurs de vitesse électrique. L'arbre suivant donne une vue d'ensemble (les abréviations sont en anglais) :
- Variateurs de vitesse électrique, avec ou sans capteurs
- Commande scalaire
- Commande U/f
- Commande vectorielle
- Commande directe du couple (DTC)
- Autocommande directe (DSC)
- Modulation des vecteurs spatiaux (SVC)
- Commande à flux orienté (FOC)
- FOC directe
- FOC indirecte
- Commande directe du couple (DTC)
- Commande scalaire
Avantages et inconvénients
La commande directe du couple a les avantages suivants (comparativement à la commande vectorielle).
- Le couple et le flux peuvent être changés rapidement, en modifiant leur consigne respective.
- Bon rendement, les transistors n'étant commutés qu'en cas de besoin.
- Réponse à un échelon sans dépassement.
- Pas de transformée de Park. Il n'est donc pas nécessaire de connaitre la position du rotor pour calculer l'algorithme.
- La modulation est réalisée directement par la méthode.
- Pas de régulateur proportionnel intégrateur (PI).
- À cause de la commande par hystérésis, la fréquence de commutation n'est pas constante. Toutefois, la définition de la plage de tolérance permet de régler approximativement la fréquence de commutation moyenne.
- Absence de pic de courant.
- Le bruit est maintenu à un bas niveau.
- Le circuit intermédiaire en tension continue est pris en compte dans l'algorithme. Les harmoniques dans cette tension ne biaisent pas le calcul.
- La synchronisation à la machine tournante est instantanée. Le flux est identifié dès l'apparition du courant.
La commande directe du couple a les inconvénients suivants.
- Le contrôleur doit être très rapide. Il lui faut une grande puissance de calcul. En effet, l'algorithme doit être calculé très régulièrement, environ tous les 10 à 30 µs, pour éviter que le flux ou le couple ne sortent de leurs plages de tolérance. En contrepartie, l'algorithme est relativement simple.
- Le capteur de courant doit être de très bonne qualité, afin de ne pas induire en erreur le contrôleur. Un filtre passe-bas ne peut pas être introduit dans le circuit pour enlever le bruit. Le retard qu'il causerait empêcherait le bon fonctionnement de l'hystérésis.
- La mesure de tension doit également être de bonne qualité, pour des raisons similaires. En général, une estimation de la tension statorique à partir de la tension continue du circuit intermédiaire et du signal de commande des transistors est utilisée.
- En haute vitesse, la méthode n'est pas sensible aux paramètres du moteur. Ce n'est pas le cas en basse vitesse, où la résistance statorique joue un rôle important dans l'estimation du flux.
Comparaison à la commande vectorielle
La commande vectorielle étant une autre méthode très répandue qui permet d'obtenir de bonnes performances. Le tableau suivant résume les principales différences entre ces deux méthodes [13] - [14] - [15]:
| Propriété | Commande directe du couple | Commande vectorielle |
|---|---|---|
| Réponse dynamique à un échelon de couple | Très rapide | Rapide |
| Système de coordonnées | alpha, beta (statorique) | d, q (rotorique) |
| Comportement en basse vitesse (< 5 % du nominal) | Nécessité d'un capteur de vitesse pour freinage continu | Bon avec capteur de position ou de vitesse |
| Variables commandées | Couple et flux statorique | flux rotorique, courant statorique iq pour la commande du couple, courant statorique id pour la commande du flux |
| Oscillation des différentes variables | Faible (si le capteur de courant est de qualité) | Faible |
| Paramètre ayant le plus d'influence (en absence de capteur) | Résistance statorique | Inductances d et q, résistance rotorique |
| Paramètre ayant le plus d'influence (en boucle fermée) | Inductances d, q, flux (à faible vitesse) | Inductances d, q, résistance rotorique |
| Mesure de la position du rotor | Non requise | Requise (capteur ou estimation) |
| Commande du courant | Non requise | Requise |
| Modulation MLI | Non requise | Requise |
| Changement de coordonnées | Non requis | Requise |
| Fréquence de commutation | Variable | Constante |
| Pertes par commutation | Très faible (si le capteur de courant est de qualité) | Faible |
| Bruit | Grésillement sur un large spectre | Bruit à fréquence constante, sifflement |
| Régulation | vitesse (régulateur PID) | vitesse (régulateur PID), flux rotorique (PI), courant id et iq (PI) |
| Complexité de l'algorithme | Faible | Grande |
| Intervalle maximum entre deux calculs successifs de l'algorithme | 10-30 microsecondes | 100-500 microsecondes |
Notes et références
- (en)/(de) Cet article est partiellement ou en totalité issu des articles intitulés en anglais « Direct torque control » (voir la liste des auteurs) et en allemand « Direkte Selbstregelung » (voir la liste des auteurs).
- (en) Manfred Depenbrock, « US4678248 Direct Self-Control of the Flux and Rotary Moment of a Rotary-Field Machine » (consulté le )
- (en) Manfred Depenbrock, « DE3438504 (A1) - Method and Device for Controlling of a Rotating Field Machine » (consulté le )
- (en) Toshihiko Noguchi et Isao Takahashi, « Quick Torque Response Control of an Induction Motor Based on a New Concept », IEEJ, , p. 61–70
- (en) Toshihiko Noguchi et Isao Takahashi, « A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor », IEEE Trans. on Industry Applications, no IA-22 (5): 820-827, (lire en ligne, consulté le )
- (en) Gilbert Foo, Sensorless Direct Torque and Flux Control of Interior Permanent Magnet Synchronous Motors at Very Low Speeds Including Standstill, Sydney, The University of New South Wales,
- (en) M. Jänecke, R. Kremer et G. Steuerwald, « Direct Self-Control (DSC), A Novel Method Of Controlling Asynchronous Machines In Traction Applications », Proceedings of the EPE'89, no 1, , p. 75–81
- (en) Martti Harmoinen, Vesa Manninen, Pasi Pohjalainen et Pekka Tiitinen, US5940286 Method for Controlling the Power To Be Transferred Via a Mains Inverter, (lire en ligne)
- (en) V. Manninen, « Application of Direct Torque Control Modulation to a Line Converter. », Proceedings of EPE 95, Sevilla, Spain, , p. 1,292-1,296.
- (en) C. French et P. Acarnley, « Direct torque control of permanent magnet drives », IEEE Transactions on Industry Applications, vol. 32, no 5, , p. 1080–1088 (DOI 10.1109/28.536869, lire en ligne, consulté le )
- (en) Heinz Lendenmann, Reza R. Moghaddam et Ari Tammi, « Motoring Ahead », ABB Review, (lire en ligne, consulté le )
- (en) Kalyan P. Gokhale, Douglas W. Karraker et Samuli J. Heikkil, US6448735 Controller for a Wound Rotor Slip Ring Induction Machine, (lire en ligne)
- (en) C. Lascu, I. Boldea et F. Blaabjerg, « A modified direct torque control (DTC) for induction motor sensorless drive. », Proceedings of IEEE IAS 98, St. Louis, MO, USA, vol. 1, , p. 415–422. (DOI 10.1109/ias.1998.732336)
- (en) X.T. Garcia, B. Zigmund, A. Terlizzi, R. Pavlanin et L. Salvatore, « Comparison Between FOC and DTC strategies for Permanent Magnet », Advances in Electrical and Electronic Engineering, vol. 5, nos 1 -2, , Vol 5, No 1–2 (2006): March - June (lire en ligne)
- (en) M. S. Merzoug et F. Naceri, « Comparison of Field Oriented Control and Direct Torque Control for PMSM », World Academy of Science, Engineering and Technology 21 2008, vol. Merzoug, no 21, , p. 209–304 (lire en ligne)
- (en) M. P. Kazmierkowski, L. Franquelo, J. Rodriguetz, M. Perez et J. Leon, « High Performance Motor Drives », IEEE Industrial Electronics Magazine Sept 2011, vol. 5, no 3, , p. 6–26 (DOI 10.1109/mie.2011.942173, lire en ligne)
Bibliographie
- Jean-Claude Alacoque, Commande directe propre aux moteurs asynchrones et synchrones, Paris, Tec et Doc – Lavoisier, , 248 p. (ISBN 978-2-7430-1279-3).
- (de) Uwe Baader, Die Direkte-Selbstregelung (DSR) : e. Verfahren zur hochdynam. Regelung von Drehfeldmaschinen, Dusseldorf, VDI-Verl., (ISBN 3-18-143521-X, lire en ligne).
- (de) Felix Jenni et Dieter Wüest, Steuerverfahren für selbstgeführte Stromrichter, Stuttgart, B.G. Teubner, , 367 p. (ISBN 3-519-06176-7).
- (en) J.N. Nash, « Direct Torque Control, Induction Motor Vector Control Without an Encoder », IEEE Trans. on Industry Applications, vol. 33, no 2, , p. 333–341 (DOI 10.1109/28.567792, lire en ligne).
- (de) Dierk Schröder, Elektrische Antriebe : Grundlagen, Berlin, Heidelberg, Springer, (ISBN 978-3-642-02989-9).
- (de) Dierk Schröder, Antriebe : Regelung von Antriebssystemen, Berlin, Heidelberg, Springer, , 1336 p. (ISBN 978-3-540-89612-8).
- (en) P. Tiitinen, P. Pohjalainen et J. Lalu, « The Next Generation Motor Control Method: Direct Torque Control (DTC) », EPE Journal, vol. 5, no 1, , p. 14–18 (DOI 10.1109/pedes.1996.537279, lire en ligne, consulté le ).
- (en) Peter Vas, Sensorless Vector and Direct Torque Control, Oxford u.a., Oxford Univ. Press, , 729 p. (ISBN 0-19-856465-1).