La transformée de Park, souvent confondue avec la transformée dqo, est un outil mathématique utilisé en électrotechnique, et en particulier pour la commande vectorielle, afin de modéliser un système triphasé grâce à un modèle diphasé. Il s'agit d'un changement de repère. Les deux premiers axes dans la nouvelle base sont traditionnellement nommés d, q. Les grandeurs transformées sont généralement des courants, des tensions ou des flux.
Dans le cas d'une machine tournante, le repère de Park est fixé au rotor. Dans le repère de Park, les courants d'une machine synchrone ont la propriété remarquable d'être continus.
Robert H. Park (en) a proposé pour la première fois la transformée éponyme en 1929. En 2000, cet article a été classé comme étant la deuxième publication ayant eu le plus d'influence dans le monde de l'électronique de puissance au XXe siècle[1].
Soit (a,b,c) le repère initial d'un système triphasé, (d,q,o) le repère d'arrivée. À titre d'exemple, la transformation est réalisée sur un courant, mais on peut l'utiliser pour transformer des tensions et des flux. La transformation matricielle associée au changement de repère est[2] :

et la transformation inverse (via la matrice inverse) :

La transformée de Park n'est pas unitaire. La puissance calculée dans le nouveau système n'est pas égale à celle dans le système initial[3].
La transformée dqo est très similaire à la transformée de Park, et elles sont souvent confondues dans la littérature. « dqo » veut dire « direct–quadrature–zero ». À la différence de la transformée de Park, elle conserve les valeurs des puissances. La transformation de changement de repère est[3] :

La transformation inverse est :

La transformée dqo donne une composante homopolaire,  égale à celle de Park multipliée par un facteur
égale à celle de Park multipliée par un facteur  .
.
Principe
La transformée dqo permet dans un système triphasé équilibré de transformer trois quantités alternatives en deux quantités continues. Cela simplifie considérablement la résolution d'équations. Une fois la solution calculée, la transformation inverse est utilisée pour retrouver les grandeurs triphasées correspondantes.
La transformée de Park reprend les principes de la transformée de Clarke, mais la pousse plus loin. Considérons un système de trois courants triphasés équilibrés :

Où  est la valeur effective du courant et
est la valeur effective du courant et  l'angle. On pourrait tout aussi bien remplacer par
l'angle. On pourrait tout aussi bien remplacer par  sans perte de généralité. En appliquant la transformation de Clarke, on obtient :
sans perte de généralité. En appliquant la transformation de Clarke, on obtient :

La transformée de Park vise à supprimer le caractère oscillatoire de  et
et  en effectuant une rotation supplémentaire d'angle
en effectuant une rotation supplémentaire d'angle  par rapport à l'axe o.
par rapport à l'axe o.
L'idée est de faire tourner le repère à la vitesse du rotor de la machine tournante. Le repère de Clarke est fixé au stator , tandis que celui de Park est fixé au rotor. Cela permet de simplifier certaines équations électromagnétiques.
Interprétation géométrique
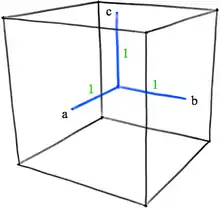
Géométriquement la transformation de Park est une combinaison de rotations. En partant d'un espace en trois dimensions ayant pour axes orthogonaux a, b, et c.
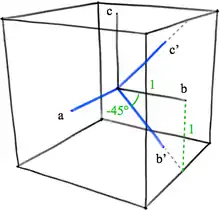
Une rotation d'axe a d'angle -45° est effectuée. La matrice de rotation est :

soit

On obtient donc le nouveau repère :
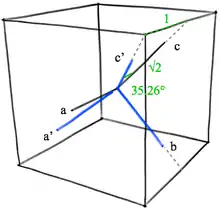
Une rotation d'axe b' et d'angle environ 35.26° ( ) est ensuite effectué :
) est ensuite effectué :

soit

La composition de ces deux rotations a pour matrice :

Cette matrice est appelée matrice de Clarke (même s'il s'agit en réalité de la matrice de Concordia, similaire à celle de Clarke à la différence qu'elle est unitaire).
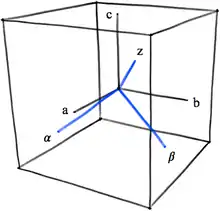 Les axes sont renommés α, β, et z (noté o dans le reste de l'article). L'axe z est à égales distances des trois axes initiaux a, b, et c (c'est la bissectrice des 3 axes ou une diagonale du cube unitaire). Si le système initial est équilibré, la composante en z est nulle, et le système est simplifié.
Les axes sont renommés α, β, et z (noté o dans le reste de l'article). L'axe z est à égales distances des trois axes initiaux a, b, et c (c'est la bissectrice des 3 axes ou une diagonale du cube unitaire). Si le système initial est équilibré, la composante en z est nulle, et le système est simplifié.
À partir de la transformée de Clarke, une rotation supplémentaire d'axe z et d'angle est effectuée.

La matrice obtenue en multipliant la matrice de Clarke à la matrice de rotation est celle de la transformée dqo :

Le repère tourne à la vitesse . Les axes du nouveau repère sont appelés d, pour direct, et q pour quadrature.
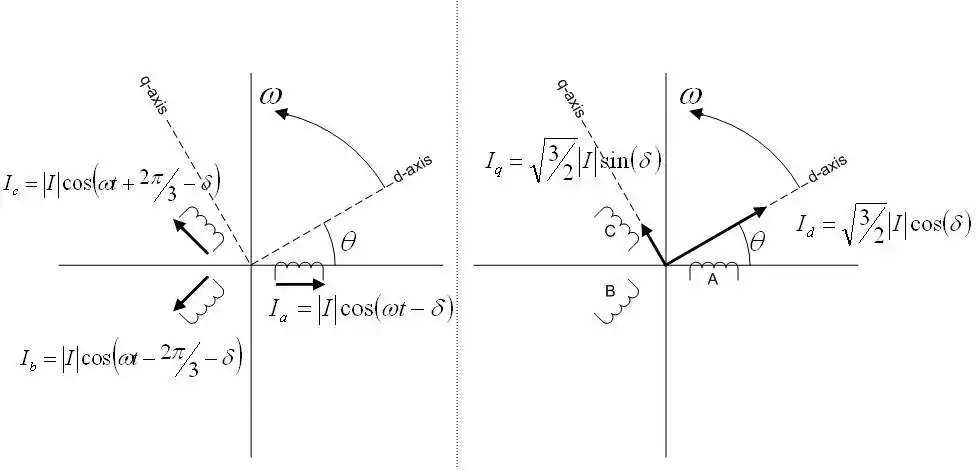
Transformée
dqo appliquée à une machine synchrone. Les trois enroulements sont séparés géométriquement par des angles de 120°. Les trois courants sont égaux en amplitude et séparés électriquement de 120°. Les courants sont déphasés par rapport aux tensions d'un angle

. Les axes
d-
q tournent à une vitesse angulaire

par rapport au stator. Il s'agit de la même vitesse angulaire que celle des courants et tensions. L'axe
d est séparé de l'enroulement A, choisi comme référence, d'un angle

. Les courants

et

sont continus.
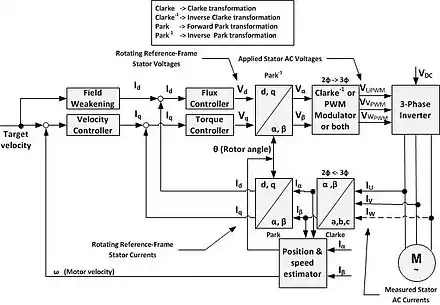
Exemple d'utilisation des transformées de Clarke et de Park dans une commande vectorielle.
Dans le cas des machines synchrones, la transformée dqo a la propriété remarquable de rendre constantes les inductances dans le temps[1].
Application
La transformation dqo est très utilisée pour résoudre des problèmes liés aux machines synchrones et aux onduleurs triphasés.