Choix des boucles de régulation
Une boucle de régulation est un élément d'un système asservi qui lui permet d'atteindre un état associé à une valeur de consigne et de s'y maintenir. Plus simplement, un mécanisme de régulation cherche à réduire l'écart entre la valeur de consigne et une grandeur physique mesurée par un ou plusieurs capteurs dont ce système est équipé. Par exemple lorsqu'une voiture veut rouler à 100 km/h (consigne), la voiture accélère beaucoup puis plus elle se rapproche de 100 plus elle réduit l'accélération jusqu'à atteindre les 100 (régulation). Pour chaque système il faut trouver la bonne boucle de régulation. Elle doit déterminer l'erreur puis la corriger, et elle doit respecter les impératifs du système (par exemple pour un robot chirurgien il ne faut que des mouvements très précis).
Analyse préalable du processus
Pour concevoir un système, il convient en premier lieu de déterminer les besoins (tolérance aux fluctuations, temps de réaction, ...) et les moyens de mesure et d'actions disponibles : réglage « tout ou rien » (TOR) ou réglage fin et continu, analogique ou numérique.
Le réglage « tout ou rien » est assez simple à mettre en œuvre : thermostat, poire de niveau, pressostat...
S'il s'avère inadéquat, il convient d'étudier le fonctionnement du système à équiper afin d'élaborer un modèle mettant en jeu les variables d'entrée et de sortie, la structure fonctionnelle qui les lie les unes aux autres, ainsi que la fonction de transfert qui la caractérise.
On associera alors à chacune des entrées / sortie une fonction reflétant l'évolution de la variable concernée au cours du temps :
- grandeur à régler : GAR qui est la variable à contrôler (pression, débit, température) ;
- grandeur réglante : GR qui est la variable de commande ; elle doit être choisie judicieusement afin de contrôler au mieux la variable à régler ;
- grandeur perturbatrice : GP qui est une variable exerçant sur le système une influence non désirée qui, autant que possible, doit être neutralisée ;
- organe réglant : OR qui est l'actionneur de la boucle (vanne, résistance, moteur) ;
- la consigne : C qui est la valeur souhaitée pour la grandeur à régler.
Typologie des régulations
Après analyse complète du système, il reste à déterminer le type de boucle à mettre en place. Il en existe deux :
- La boucle fermée ;
- La boucle ouverte.
Régulation à chaîne ouverte
La boucle ouverte : la variable perturbatrice agit sur la variable réglante. Cette boucle n'est pas à proprement parler une boucle de régulation, mais un complément à la boucle fermée. Elle s’utilise principalement pour anticiper l'évolution d'une perturbation en agissant directement sur l'organe de réglage. Cette boucle est rapide, mais relativement peu précise.
Régulation à chaîne fermée
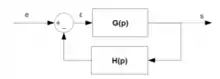
La boucle fermée : la grandeur réglante agit (par l'intermédiaire du procédé) sur la grandeur réglée. C'est la boucle de régulation de base par excellence. Elle se reconnaît à la présence d'une consigne. Elle peut agir seule ou être agrémentée d'une boucle ouverte et/ou d'asservissement. Cette boucle est précise, mais relativement lente. Quand la consigne est constante, on parle de boucle de régulation, quand elle est constamment variable, on parle de boucle d'asservissement.
Choix des structures
En se basant sur les différents types de boucles, il s’agit de déterminer une structure à travers laquelle elles interagissent. L'étude fonctionnelle du système réalisée plus haut doit permettre de concevoir un système de régulation sous forme de blocs fonctionnels.
Régulation en boucle unique
Lorsque le système n’est pas soumis à des variables perturbatrices, la boucle fermée simple est un schéma typique pour le contrôle de la variable réglante (avec ou sans bloc correcteur).
Régulation en boucles multiples
Dans le cas où plusieurs variables perturbatrices sont identifiées, leurs effets sont atténués par l’intermédiaire de boucles ouvertes qui s’imbriquent dans la boucle fermée principale. Les interactions se manifestent par le biais de blocs correcteurs (agissant généralement sur un bloc de sommation).
Régulation en cascade
Si la variable réglante est elle-même peu stable, il est possible d’ajouter à la boucle fermée (équipée ou non de boucles ouvertes) une boucle d'asservissement. Celle-ci corrigera en temps réel la position de l'organe réglant afin d’approcher la valeur de consigne demandée par la régulation principale.
Par exemple, pour un réglage de débit à l’aide d’une vanne, l'ouverture de la vanne provoque une chute de pression en amont qui induit une réduction du débit ; la boucle d'asservissement compare la demande à la valeur réelle mesurée et actionne la vanne en conséquence. ee l'exemple donné correspond à la régulation cascade sur la grandeur réglante. La régulation cascade peut se faire sur une variable interne ou intermédiaire)
Régulation de proportion
Ce type de réglage est utilisé dans l'industrie chimique où il sert par exemple à doser un mélange de produits. L'application la plus connue est l'alimentation d'une chaudière où le débit de comburant (air) doit être proportionnel et adapté à celui du carburant (gaz, fuel...). Dans cet exemple, la boucle est modifiée de sorte que, dans tous les cas, la chaudière fonctionne en excès d'air pour limiter la pollution et surtout éviter tout risque d'explosion : le débit d'air sera toujours en avance (en excès) sur celui du carburant.
Régulation par segments de plage (split range)
Ce type de boucle permet de décomposer la plage de réglage d'une variable en plusieurs segments, en général deux.
Ce genre de régulation se rencontre en climatisation chaud froid : par exemple la commande de 0 % à 50 % agit sur une vanne NO affectée à de l'eau glycolée (Froid) qu'elle ferme progressivement et de 50 % à 100 % sur une vanne NF affectée à de la vapeur surchauffée (Chaud) qu'elle ouvre progressivement. Le régulateur balaye ainsi la plage de 0 % (refroidissement maximal) à 100 % (chauffage maximal) en passant par 50 % (action neutre).
Ce type de boucle se rencontre dans certains réglages de débits, par exemple l'alimentation en eau des (générateurs de vapeur) ou l'alimentation en vapeur d'une turbopompe d'une centrale nucléaire[1].
Paramétrage
Généralités
La structure étant définie, il s’agit d’attribuer aux divers blocs du schéma fonctionnel un modèle mathématique pour sa réponse et des valeurs pertinentes pour ses paramètres. Nécessitant patience et intuition, cette phase est la plus délicate à réaliser : c’est d’elle que dépendra la performance globale du régulateur et la satisfaction des besoins prédéfinis.
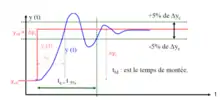
En procédant par essais et corrections, le procédé de mise au point est foncièrement itératif. A l’aide de calculs de temps de réponse, de pente de montée, de taux d’atténuation, etc., (faisant parfois usage d’abaques), les valeurs des paramètres sont progressivement adaptées à partir de simulations de la réponse du système à diverses sollicitations d'entrée. Pour certains modèles mathématiques connus, des techniques plus spécifiques (Strejc, Broïda, Ziegler-Nichols, Provoust) permettent d’affiner les paramètres, par exemple ceux d’un bloc particulier ou d’une partie du système.
Les réponses indicielle, impulsionnelle et en fréquences pures du régulateur donnent des indications précieuses sur son comportement. La fonction de transfert permet d’en mesurer la stabilité.
Dès que les valeurs des paramètres indiquent un comportement adéquat au niveau de la simulation, il est prudent, lorsque c’est possible, d’instrumenter le système physique réel afin d’obtenir des enregistrements des réponses effectives à diverses sollicitations d'entrée.
Réglage PID : méthode du régleur
À la vue des actions correctrices du régulateur, la méthode du régleur permet d’ajuster le paramétrage des régulateurs PID, soit les actions P pour proportionnelle, I pour intégrale et D pour dérivée.
Dans son application, il est nécessaire de maîtriser des phénomènes physiques et surtout d’anticiper les effets des modifications apportées.
Elle est largement répandue dans l'industrie. En règle générale, l’adaptation des paramètres peut être pratiquée en situation de maintenance, car elle est facile à mettre en œuvre et n’impose pas l'arrêt du système. Une modification progressive des conditions d’exploitation (usure, vanne, température, viscosité d'un liquide, pression, débit...) influence la fonction de transfert et peut nécessiter d’apporter des correctifs au régulateur.
Action P
Dans un premier temps, les actions D et I sont ignorées.
L’action P est ajustée de manière à obtenir la rapidité souhaitée. Son rôle premier est de réduire l’erreur de réglage. La précision de l’action P reste toutefois imparfaite à cause de l'écart de statisme. Elle peut être améliorée par augmentation du gain, mais ceci au détriment de la stabilité.
C’est le réglage le plus utilisé car sa conception est simple (amplificateur) et facile à mettre en œuvre. Dans l’industrie, les processus annexes ne nécessitant pas une précision élevée (utilités, ajustement de stocks, etc.) sont généralement conduits par des régulateurs P.
Action I
L’intérêt d’une action I est son effet d'atténuation de l'écart de statisme, et même de son annulation en régime stationnaire. D’autre part, elle se comporte comme un filtre atténuant les variations rapides (filtre passe-bas) : elle est alors intéressante pour le réglage de variables dynamiques. Toutefois, elle contribue à l’instabilité.
Dans l’industrie, l’action I est utilisée chaque fois que, pour des raisons technologiques, il est nécessaire d’obtenir une précision élevée (régulation de la pression ou de la température dans un réacteur nucléaire).
Action D
L’ajout d’une action D améliore la stabilité ; son caractère anticipatif se répercute sur la rapidité par une accélération de la réponse.
Dans l’industrie, l’action D n’est jamais utilisée seule, mais en général accompagnée de l’action I. Elle est recommandée pour le réglage de variables lentes comme la température.
Résumé
P → L'action P s’apparente à la vitesse et à la rapidité. Elle répond de manière instantanée à l’écart constaté sur la grandeur à régler ; par son gain, elle permet de vaincre les inerties du système. Le régulateur P est appréciable lorsque la précision n'est pas essentielle.
I → L'action I s’apparente à la position et à la précision. Elle complète et améliore la précision de l'action P en atténuant l'écart de statisme.
D → L'action D s’apparente à l’accélération de la réponse et à la stabilité. Pour le réglage des variables lentes, elle compense les temps morts et les inerties.
Un arbitrage entre rapidité, précision et stabilité est impératif : il consiste à trouver un compromis satisfaisant en procédant à des ajustements raisonnés.
Notes et références
- Pour cet exemple, l'échelle de débit est partagée en deux segments, 0-20 % pour un réglage fin des niveaux des générateurs de vapeur à faible puissance et 20-100 % pour un contrôle optimal des niveaux en puissance (où les vannes du segment 0-20 % restent ouvertes au-delà de 20 %). Le processus engage ainsi des vannes de caractéristiques différentes montées en parallèle.