Système d'amarrage périphérique androgyne
Le système d'amarrage périphérique androgyne (en anglais : APAS, c'est-à-dire Androgynous Peripheral Attach System ou Androgynous Peripheral Assembly System) est un système d'accouplement entre véhicules spatiaux développé pour le programme Apollo-Soyouz et utilisé par la suite dans la station Mir et la Station spatiale internationale[1]. Il est mis en œuvre d'une part par la navette spatiale américaine lorsque celle-ci s'accouple à la station spatiale internationale, d'autre part sur le module russe Zarya pour sa connexion avec la partie non russe de la station via le module d'accouplement pressurisé (PMA)[2]. Un système compatible avec l'APAS est mis en œuvre sur les véhicules spatiaux chinois Shenzhou offrant à ceux-ci la possibilité de s'amarrer à la Station spatiale internationale[3].

_close-up.jpg.webp)
Conception
APAS est conçu par Vladimir Syromyatnikov de l'entreprise moscovite RKK Energia et trouve son origine dans le programme Apollo-Soyouz[4]. L'idée qui a présidé à sa conception était que tout système d'amarrage APAS puisse s'amarrer à un autre système APAS, les deux étant androgynes. Au moment de l'amarrage, il y a obligatoirement un côté qui joue un rôle actif et l'autre un rôle passif, mais les deux côtés ont la possibilité d'être soit actif soit passif.
Il existe 3 versions du système APAS :
APAS-75
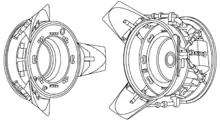
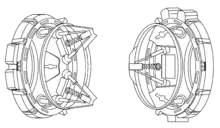
L'APAS-75 est développé pour le programme Apollo-Soyouz (ASTP). Contrairement aux systèmes d'amarrage qui l'ont précédé, les deux côtés peuvent jouer le rôle actif ou passif. Au moment de l'amarrage, les guides en forme de pétale de la partie jouant le rôle actif et les guides de la partie passive qui sont restés rétractés interagissent pour réaliser un alignement grossier. L'anneau qui maintient les guides se déplace latéralement pour aligner les verrous de la partie active avec les encoches de la partie passive dans lesquelles ceux-ci doivent s'engager. Après la jonction, des systèmes d'absorption de chocs dissipent l'énergie résiduelle de part et d'autre. La partie active se rétracte alors[5].
L'Union soviétique construisit dans le cadre de son programme spatial cinq vaisseaux Soyouz comportant un système d'amarrage APAS-75. Les trois premiers volèrent pour mettre au point le système (Cosmos 638 (en), Cosmos 672 (en) et Soyouz 16). L'un d'entre eux, Soyouz 19, fut partie prenante de la mission Apollo-Soyouz et fut seul à le mettre en œuvre. Le dernier est Soyouz 22. Côté américain, le module d'amarrage ASTP, qui assurait la jonction entre les vaisseaux Apollo et Soyouz durant la mission Apollo-Soyouz, comportait d'un côté un système d'amarrage APAS-75 et de l'autre un système propre aux vaisseaux Apollo.
APAS-89
Dans les années 1980, les Soviétiques développent parallèlement la station spatiale Mir et la navette spatiale Bourane. L'APAS-89 est conçu dans ce contexte pour permettre l'amarrage de Bourane avec la station Mir. La conception de départ de l'APAS est profondément remaniée. Le diamètre extérieur est ramené de 203 cm à 155 cm et les pétales utilisées pour l'alignement pointent désormais vers l'intérieur au lieu de l'extérieur. Cela limite le diamètre intérieur à 800 mm. En 1994 le programme de la navette Bourane est abandonné sans qu'aucun vol jusqu'à la station Mir n'ait eu lieu mais le module Kristall, qui fait partie de la station, est équipé de deux systèmes d'amarrage APAS. Lorsque le Programme Shuttle-Mir est lancé, le système APAS est retenu comme système d'amarrage entre la navette américaine et la station russe. Les navettes qui accostent la station Mir utilisent le système conçu initialement pour la navette Bourane, monté sur le socle prévu initialement pour l'amarrage à la station spatiale Freedom. Le module d'amarrage Mir, un tronçon assurant la jonction entre le module Kristall et la navette spatiale utilise l'APAS-89 des deux côtés.
APAS-95
La conception de la version APAS-95 repose sur ce qui a été mis en œuvre pour le programme Shuttle-Mir. Le système a un côté actif et un côté passif. L'anneau d'amarrage du côté actif s'étend à l'extérieur et vient s'accrocher à l'anneau passif de la station spatiale situé à l'extrémité du module d'accouplement pressurisé (PMA). L'anneau d'amarrage aligne puis rapproche les deux côtés avant d'enclencher les 12 verrous qui garantissent que la jonction est étanche.
Les autres systèmes d'amarrage
Les autres ports d'amarrage des stations spatiales russes (dont la partie russe de la station spatiale internationale) utilisent le système d'amarrage sonde-cône russe, qui fonctionne de la même manière que sur les vaisseaux Soyouz et Progress. Le Low Impact Docking System (LIDS) développé par la NASA pour le programme Constellation est un système plus compact, plus léger et plus simple que l'APAS mais n'est pas compatible avec celui-ci.
Voir aussi
Références
- « What is an Androgynous Peripheral Attach System? », NASA (consulté le )
- « Androgynous Peripheral Attach System », Boeing (consulté le )
- « Testimony of James Oberg: Senate Science, Technology, and Space Hearing: International Space Exploration Program », spaceref.com (consulté le )
- (en) Patricia Sullivan, « Vladimir Syromyatnikov; Designed Docking System for Space Capsules », The Washington Post, (consulté le )
- David S. F. Portree, « Mir Hardware Heritage », Lyndon B. Johnson Space Center (consulté le )
Source
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Androgynous Peripheral Attach System » (voir la liste des auteurs).