Shape context
Shape context, que l'on peut traduire par contexte de forme, est un algorithme de détection de caractéristique et un descripteur, présenté par des chercheurs de l'université de Californie à Berkeley pour la première fois en 2000[1]. Il est utilisé dans le domaine de vision par ordinateur, pour des tâches de détection d'objet ou de reconnaissance de caractères.
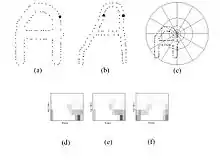
Construction d'un contexte de forme.
Le principe de l'algorithme est d'extraire d'une image les points en décrivant les contours, et d'obtenir pour chacun de ces points le contexte de forme en déterminant la distribution relative des points les plus proches au moyen d'un histogramme de distribution de coordonnées log-polaires[2].
L'algorithme a été testé sur la base de données MNIST, avec de bonnes performances.
Voir aussi
- Extraction de caractéristique en vision par ordinateur
- Scale-invariant feature transform (SIFT)
- Histogramme de gradient orienté (HOG)
- Détection de blob (en)
- Gradient Location and Orientation Histogram (en) (GLOH)
- Local Energy based Shape Histogram (en) (LESH)
Notes et références
- (en) Serge Belongie, et Jitendra Malik, « Matching with Shape Contexts », dans IEEE Workshop on Contentbased Access of Image and Video Libraries, (lire en ligne), p. 20 - 26.
- (en) « Matching with Shape Contexts », .
Liens externes
Implémentations
Cet article est issu de wikipedia. Text licence: CC BY-SA 4.0, Des conditions supplémentaires peuvent s’appliquer aux fichiers multimédias.