Shakey le robot
Shakey le robot est le premier robot générique capable de raisonner sur ses actions[1]. Il a été créé à la fin des années 1960 en Californie par SRI International avec le soutien de la DARPA. En 2004, il a été nommé au Robot Hall of Fame.

Histoire
Shakey a été développé en 1960 environ, sous la direction de Charles Rosen, directeur de l'Artificial Intelligence Center (en) de SRI International. Y ont également participé Nils Nilsson, Alfred Brain, Sven Wahlstrom, Bertram Raphael[2], Richard O. Duda (en), Peter E. Hart, Richard Fikes (en), Richard Waldinger (en), Thomas Garvey, Jay Tenenbaum, Helen Chan Wolf et Michael Wilber. Le projet était financé par la DARPA.
Aujourd'hui retiré du service, Shakey est exposé dans une vitrine au Musée de l'histoire de l'ordinateur de Mountain View (Californie)[3]. Ce projet en a inspiré beaucoup d'autres, notamment celui des Centibots.
Logiciels
Shakey a été principalement programmé en Lisp. Son algorithme de planification, STRIPS, a été conçu comme le composant principal de son logiciel. Premier robot à être un agent logique, orienté vers des objectifs, il évoluait dans un monde restreint. Celui-ci pouvait contenir des pièces reliées par des couloirs, avec des portes et des interrupteurs d'éclairage sur lesquels il pouvait agir[4].
Shakey disposait d'une courte liste d'actions disponibles (il pouvait se déplacer d'un lieu à un autre, allumer ou éteindre les lampes, ouvrir et fermer des portes, monter et descendre sur des rampes et pousser devant lui des objets[5]).Le planificateur STRIPS était capable de concevoir un plan pour effectuer toutes les actions disponibles, même si Shakey lui-même n'était pas capable de toutes les exécuter.
Une mission de Shakey pouvait ressembler à ceci :
« Un opérateur saisit sur une console d'ordinateur l'instruction « Fais tomber le bloc de la plate-forme. » Shakey regarde autour de lui, identifie une plate-forme avec un bloc dessus et une rampe lui permettant de l'atteindre. Shakey pousse la rampe contre la plate-forme, monte sur la rampe jusqu'à la plate-forme et pousse le bloc jusqu'au bord. Mission accomplie. »
Matériel
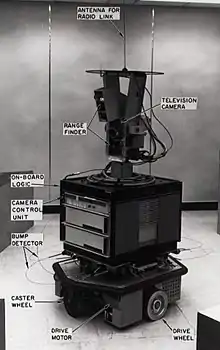
Physiquement, Shakey était particulièrement grand. Il avait une antenne radio, des sonars, une caméra de télévision, des processeurs embarqués et des détecteurs de choc[6]. La taille du robot et sa tendance à se déplacer par saccades lui ont valu son nom :
« Nous avons travaillé pendant un mois pour lui trouver un nom, depuis des noms grecs jusqu'à « étagère », puis quelqu'un a dit : — Hé, il oscille comme un fou quand il se promène, appelons-le juste Shakey. »
Résultats
Le développement de Shakey a produit un résultat qui a eu un grand impact sur la robotique et l'intelligence artificielle, ainsi que sur l'informatique en général. Il s'agit notamment de l'Algorithme A*, qui est utilisé en recherche de chemin et en parcours de graphe ; de la transformée de Hough, utilisée en analyse d'image, en vision par ordinateur et en réduction numérique du bruit vidéo ; enfin de la méthode de graphe de visibilité (en) pour trouver le plus court chemin euclidien dans un plan parmi des obstacles[7].
Notes et références
- (en) « Shakey le robot sur le site de SRI International »
- (en) « Oral History: Bertram Raphael », IEEE Global History Network, Institute of Electrical and Electronics Engineers (consulté le )
- (en) « Shakey », SRI International Artificial Intelligence Center (consulté le )
- (en) « Shakey the Robot », SRI International (consulté le )
- (en) Hans Moravec, ROBOT : Mere Machine to Transcendent Mind, (lire en ligne), « Caution! Robot Vehicle! », p. 27
- (en) « Shakey », Exhibition: Artificial Intelligence & Robotics, Computer History Museum (consulté le )
- (en) Tomás Lozano-Pérez et Michael A. Wesley, « An algorithm for planning collision-free paths among polyhedral obstacles », Communications of the ACM, vol. 22, no 10, , p. 560–570 (DOI 10.1145/359156.359164).
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Shakey the robot » (voir la liste des auteurs).
Bibliographie
- Bertram Raphael, The Thinking Computer : Mind Inside Matter,
- Stuart J Russell et Norvig, Peter, Artificial Intelligence : A Modern Approach, Upper Saddle River, New Jersey, Prentice Hall, , 3e éd., 1132 p. (ISBN 978-0-13-604259-4 et 0-13-604259-7)
Liens externes
- (en) Film de SRI International présentant Shakey (1972, durée 24 minutes).