Robot sous-marin autonome
Un robot autonome sous-marin (en anglais autonomous underwater vehicle ou AUV), est un robot qui se déplace dans l'eau de manière autonome, contrairement à un véhicule sous-marin téléopéré (remotely operated vehicle ou ROV). Dans le domaine militaire, il y est fait référence sous l'appellation unmanned undersea vehicle (UUV).

Description
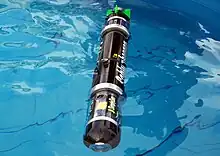
En général, les AUV ont une forme de torpille afin de minimiser leur traînée hydrodynamique, ce qui permet de limiter la consommation énergétique et donc d'augmenter leur portée. Les plus petits sont transportables à la main par une personne seule, tandis que les plus gros peuvent mesurer plusieurs mètres de longueur (exemple: AUVs AsterX et IdefX d'Ifremer). L'autonomie varie de quelques heures à quelques dizaines d'heures. On programme en surface une trajectoire prédéfinie puis le robot accomplit celle-ci de façon autonome sous la mer. Au terme de la mission, il revient en surface et est récupéré. Les communications avec le robot sont très limitées durant la mission en raison des très faibles débits des modems acoustiques. Ainsi, les données collectées ne sont accessibles que lorsque le robot revient en surface (soit par récupération du robot, soit par communication radio). Les AUV sont alimentés par des batteries. Ils sont propulsés par un ou plusieurs moteurs à hélice, complétés parfois par des gouvernes. Certains robots autonomes sous-marins se déplacent en planant, grâce à un ballast permettant de faire varier leur flottabilité. Ce type de robot porte le nom de glider et dispose d'une autonomie énergétique très supérieure (de l'ordre du mois), en raison de leur déplacement très lent (0.5 nœud).
Il existe un concours européen de robots autonomes, organisé chaque année à La Spezia par le CMRE (Centre for Maritime Research and Experimentation) de l'OTAN, à destination des étudiants : SAUC-E[1].
Modèles d'AUV
Il existe de nombreux modèles d'AUV (Remus, Bluefin Robotics, Gavia, Pluto Plus AUV…). En France, les sociétés ECA Robotics et Alseamar fabriquent également des AUVs. Ifremer dispose de deux AUVs construits sur mesure et les opère régulièrement pour des campagnes océanographiques jusqu'à 2 800 mètres de profondeur et 100 km de portée : AsterX et IdefX. Un projet d'AUV 6 000 m est actuellement en cours (projet CORAL)[2].
Domaine militaire
Plusieurs états, dont les États-Unis, l'Australie et la Grande-Bretagne, s'intéressent à des applications militaires pour des robots sous-marin autonome. La marine américaine dispose notamment d'un AUV de 26 m et d'une autonomie de 10 500 km, appelé Orca et dont le premier exemplaire est mis à l'eau en mai 2022[3].
De son côté, la marine chinoise développe une classe de robots sous-marins autonomes appelée HSU-001 (en).
L'essaim autonome
Un concept proche, qui est aussi une variante de cette approche est celle de l'essaim de petits robots capables de coopérer entre eux, l'ensemble (l'essaim) étant alors considéré comme autonome. Ces petits robots peuvent communiquer entre eux (par exemple par des signaux lumineux ou des messages acoustiques) et effectuer des tâches collaboratives, similaires ou complémentaires, comme photographier le fond marin, la photo finale étant obtenue par la combinaison de toutes les photos prises par les robots de l'essaim[4].
Notes et références
- (en) « Student Autonomous Underwater Vehicle Challenge - Europe »
- « Coral », sur Flotte océanographique française opérée par l'Ifremer (consulté le ).
- « La marine américaine va entamer les essais de son sous-marin autonome Orca XLUUV », sur Zone Militaire, (consulté le )
- Roach J.H, Thompson B.B & Marks R.J "Mapping an underwater minefield with a multi-state swarm and the effects of swarm size on performance" unpublished, cité par Lipski, Putz & Sikkema in Lipski R, Putz C & Sikkema N (2014), Autonomous Underwater Robots
- Bateau et sous-marin
Annexes
Articles connexes
Liens externes
- (en) Eca Group
- (en) Bluefin Robotics
- (en) Machine Intelligence Laboratory
Bibliographie
- Bohm H & Jensen V (2012), Build Your Own Underwater Robot and Other Wet Projects, 11th ed. Vancouver, B. C. Canada :
Westcoast Words
- OceanServer (2014). OceanServer autonomous underwater vehicle. Available: http://www.iver-auv.com/
- Yuh (2000), "Design and control of autonomous underwater robots: a survey" Autonomous Systems Laboratory, University of
Hawaii, Honolulu, Hawaii