Radar multistatique
Un radar multistatique est un ensemble radar qui comporte au moins trois composants — par exemple, un récepteur et deux émetteurs, ou deux récepteurs et un émetteur, ou encore plusieurs émetteurs et plusieurs récepteurs pour sonder un espace commun. Il peut même n'être composé que de récepteurs, comme un radar passif, et utiliser les émissions électromagnétiques de sources ambiantes (signal de télévision, GPS[1], etc.). C'est, en fait, une généralisation du radar bistatique avec un ou plusieurs récepteurs traitant les informations de un ou plusieurs émetteurs situés sur des positions différentes.
Une distinction importante par rapport aux radars monostatiques, dont la même antenne émet et capte les échos, les échos provenant des différentes composantes du multistatique doivent subir une fusion pour déterminer la position et le déplacement des cibles. La diversité spatiale offerte par les systèmes multistatifs permet cependant de visualiser simultanément différents aspects d'une cible et présente un potentiel de gain d'information par rapport aux systèmes conventionnels.
Caractéristiques
Étant donné que le radar multistatique peut contenir à la fois des composants monostatiques et bistatiques, les avantages et les inconvénients de chaque installation radar s'appliqueront également aux systèmes multistatiques. Un système avec N et M récepteurs contiendra paires de composants, chacune pouvant impliquer un angle bistatique différent et une surface équivalente radar[2]. Les caractéristiques ci-dessous sont uniques à l'agencement multistatique, où plusieurs paires émetteur-récepteur sont présentes.

Détection

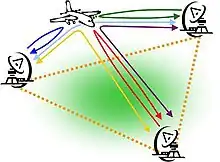
Avec une configuration multistatique, la connaissance des retards entre les échos provenant de trois émetteurs en se réfléchissant sur une même cible permet de déterminer les coordonnées de la position de cette cible (intersection de trois ellipsoïdes de révolution, comme la figure ci-contre. De plus, en notant les décalages Doppler des signaux, il est possible de déterminer explicitement les composantes du vecteur vitesse de la cible. Si l'on dispose d'au moins trois géométries différentes de couples émetteur-récepteur non liés, alors le vecteur vitesse obtenu est un vecteur vitesse absolu et non un simple vecteur radial comme dans un radar monostatique ou bistatique[2].
Une couverture accrue avec un radar multistatique peut être obtenue grâce à l'étalement de la géométrie du radar à toute la zone de surveillance. En plaçant stratégiquement les émetteurs et les récepteurs, les cibles se rapprochant physiquement des paires récepteurs-émetteurs donnent un rapport signal sur bruit plus élevé. La diversité spatiale des composantes peut également être bénéfique lors de la combinaison d'informations provenant de plusieurs paires émetteur-récepteur qui ont une couverture partagée. En corrélant les rendements individuels des paires, la détection peut être optimisée pour mettre davantage l'accent sur les détections les plus intenses à partir de certaines valeurs de section équivalente ou de trajet de propagation le plus probable.
Ceci est utile lorsque l'écho peut revenir par trajets multiples et créer des échos fantômes sur un radar monostatique. Un domaine d'intérêt notable d'utilisation est dans l'élimination des échos de mer par le décalage Doppler qui n'est cohérent que pour le trajet direct. Également, de nombreux véhicules furtifs sont conçus pour refléter l'énergie radar dans une direction différentes de cette du radar afin de présenter le plus petit retour possible à un système monostatique mais la distribution spatiale de récepteurs multistatiques permet de capter ces échos déviés.
Résolution
Dans un radar conventionnel, la résolution dépend de la largeur du faisceau en azimut et de la longueur de l'impulsion en portée. La résolution azimutale varie donc avec la distance au radar à mesure que le faisceau s'étale, mais elle reste la même en portée. La résolution azimutale est donc généralement plus faible que celle en portée. Dans un radar multistatique, la résolution dépendant de l'intersection des ellipses de résolution de chaque paires émetteur-récepteur comme dans la figure ci-contre. Il y a donc un potentiel de gains en multipliant ces paires.
Cela implique un processus consistant à associer la détection de cibles individuelles par plusieurs paires émetteur/récepteur. En raison de la nature non coopérative des cibles, il existe un potentiel, si un certain nombre de cibles sont présentes, pour que des ambiguïtés ou des «cibles fantômes». Ceux-ci peuvent être réduits grâce à une augmentation de l'information (par exemple, l'utilisation de l'information Doppler, l'augmentation de la résolution en aval ou l'ajout de données provenant d'autres radars).
Classification
Les caractéristiques de cibles telles que la variation de la section équivalente radar ou la modulation du moteur à réaction peuvent être observées par des paires émetteur-récepteur dans un système multistatique. Le gain d'information par l'observation directe de différents aspects d'une cible peut améliorer la classification de la cible. La plupart des systèmes de défense aérienne existants utilisent une série de radars monostatiques en réseau, sans utiliser de paires bistatiques dans le système.
Robustesse
Un problème dans un émetteur ou un récepteur pour un système monostatique ou bistatique entraînera une perte complète de la fonctionnalité du radar. Par contre, dans un système multistatique, la perte d'un élément peut être compensé par les autres. D'autre part, du point de vue tactique, un seul grand émetteur sera plus facile à localiser et à détruire par rapport à plusieurs émetteurs répartis. De même, il peut être difficile de faire du brouillage et déception radar pour plusieurs récepteurs par rapport à un seul site.
Synchronisation spatio-temporelle
Pour déduire la portée ou la vitesse d'une cible par rapport à un système multistatique, il faut connaître la localisation spatiale des émetteurs et des récepteurs. De plus, une synchronisation temporelle et une fréquence partagée doit être maintenue si le récepteur n'a aucune ligne de visée directe vers l'émetteur. Comme dans le radar bistatique, sans cette connaissance, il est impossible de savoir quel écho est associé avec une impulsion particulière émise par le radar. Pour les systèmes exploitant la fusion de données avant la détection, il faut un synchronisation précise de temps et/ou de la phase des différents récepteurs. Le marquage temporel se fait à l'aide d'une horloge GPS standard (ou d'un étalon similaire).
Bande passante de communication
L'augmentation de l'information provenant des multiples paires monostatiques ou bistatiques dans le système multistatique doit être combinée pour que les avantages soient réalisés. Ce processus de fusion peut aller du simple cas de détection par le récepteur le plus proche d'une cible (en ignorant les autres), augmentant en complexité avec un faisceau formé électroniquement pour repérer toutes les cibles. En fonction de cela, une large bande passante de communication peut être nécessaire pour transmettre toutes les données captées vers le processeur radar central.
Exigences de traitement
La fusion de données signifie toujours une augmentation du traitement par rapport à un seul radar. Cependant, il peut être particulièrement coûteux informatiquement si un traitement important est nécessaire pour la fusion de données, par exemple pour augmenter de la résolution.
Bibliographie
- (en) V.S. Chernyak, Fundamentals of Multisite Radar System, Gordon and Breach Science Publishers, , 492 p. (ISBN 90-5699-165-5, lire en ligne).
- (en) J. Li et P. Stoica, MIMO Radar Signal Processing, Hoboken, NJ, Wiley-IEEE Press, , 448 p. (ISBN 978-0-470-17898-0 et 0-470-17898-1).
- (en) M. M. Naghsh, M. Modarres-Hashemi, S. Shahbazpanahi, M. Soltanalian et P. Stoica, « Unified Optimization Framework for Multi-Static Radar Code Design Using Information-Theoretic Criteria », IEEE Transactions on Signal Processing, vol. 61, no 21, , p. 5401-5416 (lire en ligne).
Notes et références
- Frédéric Maussang, Franck Daout, Guillaume Ginolhac et Françoise Schmitt, « Imagerie radar multistatiqueutilisant des émetteurs d’opportunité GPS », Colloque GRETSI, Troyes, 11-14 septembre 2007, p. 1101-1104 (lire en ligne [PDF], consulté le ).
- Khalil Jishy, Pistage de cibles manoeuvrantes en radar passif par filtrage à particules gaussiennes, HAL, coll. « Archives ouvertes », , 154 p. (lire en ligne), chap. 2.10 (« Radar multistatique »), p. 17-18.