Problème de Weber
Le problème de Weber est l’un des problèmes les plus célèbres[1] de la théorie de la localisation. Il généralise le problème de Fermat et il a lui-même été généralisé par le problème d’attraction-répulsion.
Définition et historique
| Le problème de Fermat | Le problème de Weber | Le problème d’attraction-répulsion | |
|---|---|---|---|
| Formulé par | Fermat (avant 1640) | Simpson (1750) | Tellier (1985) |
| Solution géométrique du problème du triangle | Torricelli (1645) | Simpson (1750) | Tellier (2013) |
| Solution numérique directe du problème du triangle | Tellier (1972) | Tellier (1972) | Tellier (1985) |
| Solution numérique itérative du problème | Kuhn et Kuenne (1962) | Kuhn et Kuenne (1962) | Chen, Hansen, Jaumard et Tuy (1992) |
Dans le cas du triangle, le problème de Fermat consiste à localiser un point D par rapport à trois points A, B et C de telle manière que la somme des distances entre D et chacun des trois autres points soit minimisée. Ce problème a été formulé par Fermat avant 1640 et il peut être vu comme le début véritable à la fois de la théorie de la localisation et de l’économie spatiale. Torricelli a trouvé une solution géométrique de ce problème vers 1645, mais, plus de 325 ans plus tard, ce problème n’avait toujours pas de solution numérique directe. Kuhn et Kuenne[2] ont trouvé une solution itérative du problème général de Fermat en 1962 et, en 1972, Luc-Normand Tellier[3] a trouvé une solution numérique directe du problème du triangle de Fermat, cette solution étant trigonométrique. La solution de Kuhn et Kuenne vaut pour les cas du triangle et de polygones de plus de trois côtés, tandis que la solution de Tellier ne vaut que pour le triangle ; ce, pour des raisons expliquées plus bas.
Quant au problème de Weber[4], il consiste, dans le cas du triangle, à localiser un point D par rapport à trois points A, B et C de manière à minimiser la somme des coûts de transport entre D et chacun des trois autres points. Ce problème constitue une généralisation du problème de Fermat du fait qu’il prend en compte, comme on le verra plus loin, à la fois des forces d’attraction égales et inégales, alors que le problème de Fermat ne traite que du cas où toutes les forces d’attraction du système sont égales. Le problème du triangle « de Weber » a été formulé et résolu pour la première fois par Thomas Simpson en 1750[5] mais porte le nom d'Alfred Weber, qui le popularisa 1909. La solution itérative de Kuhn et Kuenne trouvée en 1962 et la solution directe de Tellier trouvée en 1972 s’appliquent au problème du triangle de Weber tout comme à celui du triangle de Fermat, la solution de Kuhn et Kuenne étant aussi valable pour le cas des polygones de plus de trois côtés.
Dans sa version la plus simple, le problème d’attraction-répulsion consiste à localiser un point D par rapport à trois points A1, A2 et R de telle manière que les forces d’attraction exercées par les points d’attraction A1 et A2, et la force de répulsion exercée par le point de répulsion R s’annulent, ce qui caractérise la localisation optimale du point D. Ce problème constitue une généralisation à la fois du problème de Fermat et de celui de Weber. Il a été formulé et résolu pour la première fois, dans le cas du triangle, en 1985 par Tellier[6] - [7]. En 1992, Chen, Hansen, Jaumard et Tuy[8] ont trouvé une solution itérative du problème d’attraction-répulsion pour le cas de polygones ayant plus de trois côtés.
Solutions
- Solution géométrique de Torricelli du problème du triangle de Fermat
La solution géométrique de Torricelli du problème du triangle de Fermat découle de deux observations :
- le point D occupe une localisation optimale quand tout mouvement hors de cette localisation se traduit par une augmentation nette de la somme des distances de D aux points de référence A, B et C, ce qui implique que cette localisation optimale correspond au seul point où un mouvement infinitésimal vers un des trois points de référence entraîne une réduction de la distance entre D et ce point qui est tout juste annulée par la somme des variations observées dans les distances aux deux autres points de référence ; de fait, dans le problème de Fermat, l’avantage obtenu en réduisant d’un kilomètre la distance entre D et A est égal à l’avantage découlant d’une réduction d’un kilomètre de la distance entre D et B ou entre D et C, ce qui implique que l’activité localisée au point D est également attirée à la fois par les points A, B et C ou, dit autrement, les points A, B et C exercent sur D des « forces d’attraction » égales ;
- selon un théorème important de la géométrie euclidienne, tout quadrilatère (polygone convexe de quatre côtés) inscrit dans un cercle est tel que ses angles opposés sont supplémentaires (ce qui signifie que leur somme est égale à 180°); ce théorème peut aussi prendre la forme suivante: si on coupe un cercle par une corde AB, on obtient deux arcs de cercles, disons l’arc AiB et l’arc AjB ; sur l’arc de cercle AiB, l’angle ∠AiB est le même quel que soit le point i choisi, ce qui vaut aussi pour l’arc de cercle AjB ; de plus, les angles ∠AiB et ∠AjB sont supplémentaires.
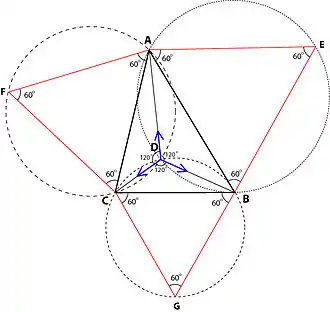
À partir de la première observation, on peut prouver qu’à l’optimum, les angles entre les droites AD, BD et CD doivent forcément être égaux à 360° / 3 = 120°. Torricelli a tiré de cette conclusion que :
- si l'on construit, à partir d’un triangle ABD dont l’angle ∠ADB est égal à 120°, un quadrilatère convexe ABDE inscrit dans un cercle, l’angle ∠ABE du triangle ABE doit être égal à (180° - 120°)= 60° ;
- une façon de déterminer l’ensemble de toutes les localisations possibles de D pour lesquelles l’angle ∠ADB est égal à 120° à l’intérieur du triangle ABC consiste à tracer un triangle ABE équilatéral (parce que tous les angles d’un triangle équilatéral sont égaux à 60°) dont le point E se trouve de l’autre côté de la droite AB par rapport au point C et de tracer un cercle circonscrit à partir de ce triangle ; alors, tous les points D’ de la circonférence de ce cercle qui se trouvent à l’intérieur du triangle ABC sont tels que l’angle ∠AD’B est égal à 120° ;
- le même raisonnement peut être fait à propos des triangles ACD et BCD ;
- ceci conduit à tracer les deux autres triangles équilatéraux ACF et BCG ainsi que deux autres cercles circonscrits à partir de ces triangles équilatéraux, ce qui permet de déterminer le point d’intersection des trois cercles circonscrits, ce point d’intersection étant celui où les angles séparant les droites AD, BD et CD sont tous égaux à 120°, ce qui prouve que ce point d’intersection correspond à la localisation optimale de D.
- Solution géométrique de Simpson du problème du triangle de Weber
La solution de Simpson au problème « de Weber » découle directement de celle de Torricelli au problème de Fermat. Simpson et Weber ont souligné le fait que, lorsqu’il s’agit de minimiser le coût total de transport, l’avantage de se rapprocher d’un des points d’attraction A, B ou C dépend de ce qui est transporté à partir ou en direction de ces points et des coûts de transport qui y sont applicables. En conséquence, l’avantage de se rapprocher d’un kilomètre de A, de B ou de C n’est pas le même. Il varie. Aussi les angles ∠ADB, ∠ADC et ∠BDC n’ont plus à être, chacun, de 120°.
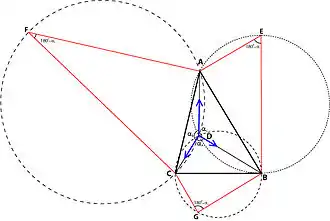
Simpson a compris que, de la même manière que, dans le cas du problème du triangle de Fermat, les triangles construits ABE, ACF et BCG étaient équilatéraux parce que les trois forces d’attraction étaient égales, dans le cas du problème du triangle de Weber, les triangles construits ABE, ACF et BCG devaient être proportionnels aux diverses forces d’attraction du système de localisation.
La solution de Simpson est telle que :
- dans le triangle construit ABE, où le polygone ABEC est un polygone convexe, le côté AB est proportionnel à la force d’attraction Cw tirant vers C, le côté AE est proportionnel à la force d’attraction Bw tirant vers B, et le côté BE est proportionnel à la force d’attraction Aw tirant vers A;
- dans le triangle construit BCG, où le polygone ABCG est un polygone convexe, le côté BC est proportionnel à la force d’attraction Aw tirant vers A, le côté BG est proportionnel à la force d’attraction Bw tirant vers B et le côté CG est proportionnel à la force d’attraction Cw tirant vers C;
- le point optimal D se trouve à l’intersection des deux cercles circonscrits tracés autour des triangles construits ABE et BCG.
On aura compris qu’un troisième triangle construit proportionnel au triangle des forces d’attraction peut être construit à partir du côté AC et que le cercle circonscrit tracé à partir de ce triangle construit croise aussi les deux autres cercles circonscrits au point D.
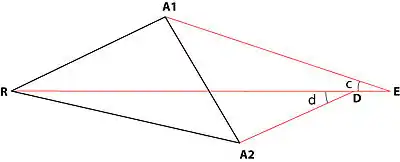
- Solution géométrique du problème d’attraction-répulsion
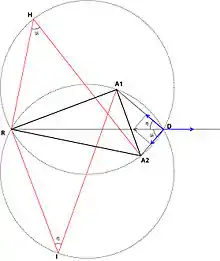
Luc-Normand Tellier[9] a trouvé une solution géométrique au problème d’attraction-répulsion triangulaire. Cette solution diffère significativement des solutions de Torricelli et de Simpson. Alors que, dans ces deux derniers cas, les triangles des forces étaient construits à l’extérieur du triangle de localisation ABC, ici, deux triangles construits se superposent au triangle de localisation A1A2R (où A1 et A2 sont deux points d’attraction et R est un point de répulsion).
La solution se caractérise par le fait que :
- dans le triangle construit RA2H, le côté RA2 est proportionnel à la force d’attraction A1w tirant vers A1, le côté RH est proportionnel à la force d’attraction A2w tirant vers A2, et le côté A2H est proportionnel à la force de répulsion Rw qui éloigne du point R ;
- dans le triangle construit RA1I, le côté RA1 est proportionnel à la force d’attraction A2w tirant vers A2, le côté RI est proportionnel à la force d’attraction A1w tirant vers A1 et le côté A1I est proportionnel à la force de répulsion Rw qui éloigne du point R ;
- les deux cercles circonscrits autour des deux triangles construits se croisent au même point, soit au point optimal D.
Évidemment, cette solution n’est applicable que si aucune des trois forces n’est dominante (une force est dominante si sa « grandeur » est supérieure à la somme des grandeurs des deux autres forces) et si les angles sont compatibles. En effet, dans certains cas, les angles du problème peuvent être incompatibles, même si aucune force n’est dominante ; alors la localisation optimale se trouve au point exerçant la force d’attraction la plus grande.
- Solution trigonométrique des problèmes des triangles de Fermat et de Weber
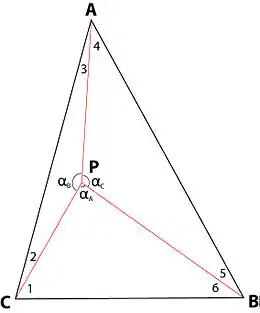
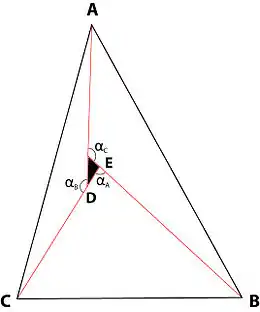
Plus de 332 ans séparent la première formulation du problème du triangle de Fermat et la découverte d’une solution numérique non itérative à ce problème. Cela étonne d’autant plus que, pendant tout ce temps ou presque, ce problème avait une solution géométrique. Un examen de deux cas de figure permet de comprendre pourquoi il en a été ainsi. Dans le cas classique, quand la solution optimale a été trouvée, six angles ∠1, ∠2, ∠3, ∠4, ∠5 et ∠6 caractérisent les problèmes de Fermat et de Weber, ces angles étant ceux qui sont formés par les trois côtés du triangle de localisation et les trois vecteurs pointant vers les trois sommets de ce triangle. En examinant ce cas classique, nous pouvons facilement écrire les six équations suivantes comportant six inconnues (soit les angles ∠1, ∠2, ∠3, ∠4, ∠5 et ∠6) et six valeurs connues (soit les trois angles ∠A, ∠B et ∠C du triangle de localisation, angles qui sont donnés, et les trois angles ∠αA , ∠αB et ∠αC formés par les trois vecteurs orientés vers les points d'attraction A, B et C dont les valeurs dépendent uniquement de la grandeur relative des trois forces d’attraction tirant vers les points d’attraction A, B et C, les trois forces d’attraction étant aussi données) :
∠1 + ∠2 = ∠C ;
∠3 + ∠4 = ∠A ;
∠5 + ∠6 = ∠B ;
∠1 + ∠6 + ∠αA = 180° ;
∠2 + ∠3 + ∠αB = 180° ;
∠4 + ∠5 + ∠αC = 180°.
Malheureusement, ce système de six équations comportant six inconnues est indéterminé, ce qui constituait un obstacle majeur dans la recherche d’une solution numérique directe. Le second cas de figure explique pourquoi les équations de ce système sont redondantes. Ce cas correspond à la situation où les trois vecteurs n'ont pas une origine commune. Nous observons dans un tel cas que les six équations que nous avons écrites sont toujours valides alors que le second cas de figure diffère du premier du fait que, dans le second cas, la localisation optimale P est disparue à cause de l’apparition d’un « trou » à l’intérieur du triangle. De fait, comme Tellier l’a démontré[3], ce trou triangulaire a exactement les mêmes proportions que les triangles des forces construits dans la solution géométrique de Simpson.
Ayant constaté que l’existence possible de ce trou triangulaire explique la redondance des équations du système écrit plus haut, il s’agit pour trouver une solution d’ajouter à ce système une septième exigence selon laquelle il ne doit pas y avoir de tel trou triangulaire à l’intérieur du triangle. En d’autres mots, il faut que les points d'origine des trois vecteurs pointant vers les sommets du triangle de localisation coïncident.
En somme, la solution trigonométrique des problèmes des triangles de Fermat et de Weber comporte trois étapes.
- Il faut d’abord calculer les angles ∠αA , ∠αB et ∠αC qui sont tels que les trois forces d’attraction Aw, Bw and Cw s’annulent comme elles doivent le faire à l’équilibre qui caractérise l’optimum. Les trois équations indépendantes suivantes permettent de faire ces calculs :
cos ∠αA = -( Bw2 + Cw2 - Aw2) / (2 Bw Cw) ;
cos ∠αB = -( Aw2 + Cw2 - Bw2) / (2 Aw Cw) ;
cos ∠αC = -( Aw2 + Bw2 - Cw2) / (2 Aw Bw) ; - Il faut ensuite estimer la valeur de l’angle ∠3 à l’aide de l’équation suivante qui découle de l’exigence selon laquelle le point D doit coïncider avec le point E :
tan ∠3 = (k sin k’) / (1 + k cos k’), où
k = (CB/CA) (sin ∠αB / sin ∠αA) et
k’ = (∠A +∠B + ∠αC) - 180° ; - L’angle ∠3 étant maintenant connu, il ne reste plus qu’à résoudre le système d’équations simultanées suivant :
∠1 + ∠2 = ∠C ;
∠3 + ∠4 = ∠A ;
∠5 + ∠6 = ∠B ;
∠1 + ∠6 + ∠αA = 180° ;
∠2 + ∠3 + ∠αB = 180° ;
∠4 + ∠5 + ∠αC = 180°.
- Solution trigonométrique du problème d’attraction-répulsion triangulaire
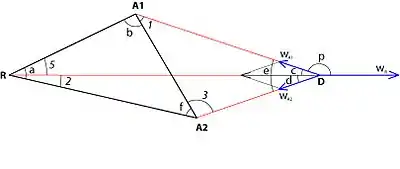
Luc-Normand Tellier[6] a étendu le problème de Fermat-Weber au cas des forces de répulsion. Supposons un triangle A1A2R impliquant deux forces d’attraction A1w et A2w et une force de répulsion Rw. Dans ce cas comme dans le cas précédent, il est imaginable que les points d'origine des trois vecteurs ne coïncident pas, ce qui pose le même problème qu'antérieurement. La solution trigonométrique de ce problème comporte les étapes suivantes :
- Déterminer l’angle ∠e :
cos ∠e = -( A1w2 + A2w2 - Rw2) / (2 A1w A2w) ; - Déterminer l’angle ∠p :
cos ∠p = -( A1w2 + Rw2 – A2w2) / (2 A1w Rw) ; - Déterminer l’angle ∠c :
∠c = 180° - ∠p ; - Déterminer l’angle ∠d :
∠d = ∠e - ∠c ; - Déterminer l’angle ∠3 à l’aide de l’équation suivante qui découle de l’exigence selon laquelle le point D doit coïncider avec le point E :
tan ∠3 = x / y où
x = sin ∠f – (RA1/RA2)(sin ∠d sin [∠e - ∠b] / sin ∠c) et
y = (RA1/RA2)(sin ∠d cos [∠e - ∠b] / sin ∠c) - cos ∠f ; - Déterminer l’angle ∠1 :
∠1 = 180° - ∠e - ∠3 ; - Déterminer l’angle ∠5 :
∠5 = 180° - ∠b - ∠c - ∠1 ; - Déterminer l’angle ∠2 :
∠2 = ∠a - ∠5.
- Solutions itératives des problèmes de Fermat, de Weber et d’attraction-répulsion
Quand le nombre de forces dépasse trois, il n’est plus possible de déterminer les angles séparant les forces sans prendre en compte la géométrie du polygone de localisation. Les méthodes géométriques et trigonométriques sont alors inapplicables. Dans un tel cas, on doit recourir à des méthodes itératives d’optimisation. Kuhn et Kuenne[2] en ont défini une qui permet de résoudre des problèmes de Fermat et des problèmes de Weber impliquant plus de trois forces d’attraction, mais qui ne peut s’appliquer au cas des problèmes d’attraction-répulsion. Dans ce dernier cas, si le nombre de forces dépasse le nombre de trois, il faut avoir recours à l’algorithme mis au point par Chen, Hansen, Jaumard et Tuy[8].
Interprétation de la théorie de la rente foncière à la lumière du problème d’attraction-répulsion
Dans l’espace économique concret, les forces de répulsion sont omniprésentes. Les valeurs foncières y sont tout particulièrement associées à tel point que l’essentiel de la théorie des valeurs foncières, tant urbaines et rurales, peut se résumer de la façon suivante.
Dans un espace où n’existe qu’un seul point d’attraction (qu’il s’agisse d’un centre-ville ou d’un marché en territoire agricole) et où tous les agents économiques (producteurs ou consommateurs) subissent la force d’attraction de ce point, la concurrence entre les divers enchérisseurs cherchant à se localiser au centre fait naturellement naître des valeurs foncières qui transforment l’unique point d’attraction du système en point de répulsion du point de vue des valeurs foncières. Cette émergence de forces de répulsion permet la réalisation d’un équilibre spatio-économique caractérisé par le fait qu’à l’optimum, chaque agent économique se localisera là où la force d’attraction et la force de répulsion qu’exerce sur eux le centre s’annulent.
Le problème d’attraction-répulsion et la Nouvelle économie géographique
La formulation du problème d’attraction-répulsion a précédé l’émergence de la Nouvelle économie géographique, vaste courant de recherche qui s’est développé dans les années 1990 et a valu en 2008 à Paul Krugman un « prix Nobel d'économie ». Ottaviano et Thisse[10] y voient un prélude à ce courant. En effet, le concept de forces d’attraction et de répulsion est proche parent de celui de forces d’agglomération et de dispersion développé par la Nouvelle économie géographique.
Références
- (en) George O. Wesolowsky, « The Weber problem: History and perspective », Location Science, vol. 1, , p. 5-23.
- (en) Harold W. Kuhn et Robert E. Kuenne, « An efficient algorithm for the numerical solution of the generalized Weber problem in spatial economics », Journal of Regional Science, vol. 4, , p. 21-34.
- (en) L.-N. Tellier, « The Weber problem: Solution and interpretation », Geographical Analysis, vol. 4, no 3, 1972, p. 215-233.
- (de) Alfred Weber, Über den Standort der Industrien, Tübingen, J.C.B. Mohr, — trad. (en) The Theory of the Location of Industries, Chicago, University of Chicago Press, , 256 p..
- (en) Thomas Simpson, The Doctrine and Application of Fluxions, Londres, .
- Luc-Normand Tellier, Économie spatiale: rationalité économique de l'espace habité, Chicoutimi, Gaëtan Morin, , 280 p..
- (en) Luc-Normand Tellier et Boris Polanski, « The Weber problem: frequency of different solution types and extension to repulsive forces and dynamic processes », Journal of Regional Science, vol 29, no 3, 1989, p. 387-405
- (en) Pey-Chun Chen, Pierre Hansen, Brigitte Jaumard et Hoang Tuy, « Weber's Problem with attraction and repulsion », Journal of Regional Science, vol. 32, 1992, p. 467-486.
- L.-N. Tellier, « Solution géométrique du cas triangulaire du problème d’attraction-répulsion », annexe 1 de : Pierre Hansen, Christophe Meyer et Luc-Normand Tellier, « Modèles topodynamique et de la Nouvelle économie géographique : compatibilité, convergence et avantages comparés », dans Marc-Urbain Proulx, Sciences du territoire II : méthodologies, Québec, PUQ, .
- (en) Gianmarco Ottaviano et Jacques-François Thisse, « New Economic Geography: what about the N? », Environment and Planning A, vol. 37, 2005, p. 1707-1725.