Estimation récursive bayésienne
L'estimation récursive bayésienne, aussi connue comme le filtrage bayésien, est une approche générale probabiliste pour l'estimation d'une fonction inconnue de densité de probabilité récursive durant une période utilisant des mesures et un modèle mathématique.
En robotique
Un filtrage bayésien est un algorithme utilisé en informatique pour calculer la probabilité de plusieurs croyances afin qu'un robot en déduise sa position et son orientation. Essentiellement, le filtrage bayésien permet aux robots de mettre à jour continuellement leur position la plus probable dans un système de coordonnées, en se basant sur les données les plus récentes des capteurs sensoriels. C'est un algorithme récursif. Il consiste en deux parties : prédiction et innovation. Si les variables sont linéaires et normalement distribuées, le filtre bayésien devient équivalent au filtre de Kalman.
Dans un exemple simple, un robot se déplaçant à travers un repère tel que sur un sol où serait dessinée une grille, devrait avoir plusieurs capteurs différents informant sur son environnement. Le robot peut ainsi démarrer avec une certitude qu'il est à la position (0,0). Cependant, au fur et à mesure qu'il se déplace de sa position d'origine, le robot perd continuellement de la certitude sur sa position actuelle. Cela parce que les moteurs faisant se déplacer et les capteurs informant ne sont pas parfaits à 100 %. En utilisant un filtrage bayésien, une probabilité peut être assignée à la croyance du robot à propos de son actuelle position, et cette probabilité peut être continuellement mise à jour depuis l'information provenant des capteurs sensorielles.
Modèle
L'état du processus est présumé être un procédé de Markov à espace d'états discret, et la mesure est l'état observé du Modèle de Markov caché. L'image suivante représente un réseau Bayésien d'un Modèle de Markov caché.


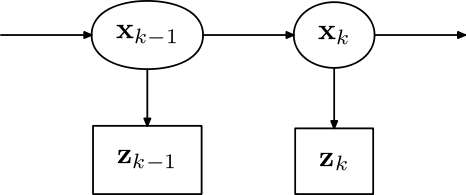
En raison de la déduction de Markov, la probabilité de l'actuel état, étant donné l'état immédiatement précédent, est conditionnellement indépendante des autres états plus antérieurs.

Par similitude, la mesure à la K-ième étape est uniquement dépendante de l'état courant, donc conditionnellement indépendante de tous les autres états.

À partir de ces deux suppositions, la distribution de la probabilité de tous les états du Modèle de Markov caché peut être écrite ainsi :

Cependant, en utilisant le filtre de Kalman pour estimer l'état x, la distribution de la probabilité est associée avec l'actuel état conditionné par la mesure à la période actuelle concernée. (Cela est atteint en retirant l'état précédent et en divisant par la probabilité de ce qui a été mesuré.)
Cela mène aux étapes de prédiction et de mise à jour du filtre de Kalman écrit de manière probabiliste. La distribution de la probabilité associée à l'état prédit est la somme des produits de la distribution de probabilité associée à la transition de la (k - 1)-ième étape à la k-ième et la distribution de probabilité avec l'état précédent, sur toutes les possibilités .


La distribution de la probabilité de la mise à jour est proportionnelle au produit de la mesure la plus probable et de l'état prédit.

Le dénominateur

est relatif à , donc nous pouvons le remplacer par un coefficient , lequel peut être ignoré en pratique. Le numérateur peut être calculé et ainsi simplement normalisé, dès lors que son intégrale est unitaire.

Applications
- Filtre de Kalman, un filtre de Bayes récursif pour une Distribution normale à variable multiple
- Filtre particulaire, une technique séquentielle de Monte Carlo (SMC), qui modélise la densité de probabilité en utilisant un pool de points discrets.
- Grid-based estimators, qui subdivise la Densité de probabilité en une grille discrète.
Filtrage séquentiel Bayésien
Le filtrage séquentiel Bayésien est l'extension de l'estimation Bayésienne pour le cas où la valeur observée change pendant le temps. C'est une méthode pour estimer la valeur réelle d'une variable observée qui évolue dans le temps.
La méthode est nommée:
- filtrée
- quand nous estimons l'actuelle valeur étant donné les observations passées,
- lissée
- quand on estime les valeurs passées étant donné les mesures présentes et passées et
- prédite
- quand on estime une probable valeur futur.
La notion de filtrage Bayésien séquentielle est largement utilisé dans le contrôle théorique et la robotique.
Liens externes
- A Tutorial on Particle Filters for On-line Non-linear/Non-Gaussian Bayesian Tracking, IEEE Transactions on Signal Processing (2001)
- A survey of probabilistic models, using the Bayesian Programming methodology as a unifying framework
- Feynman-Kac models and interacting particle algorithms
Texte anglais à traduire :
(a.k.a. Particle Filtering) Theoretical aspects and a list of application domains of particle filters