Bras télémanipulateur européen
Le bras télémanipulateur européen (en anglais European Robotic Arm ou ERA) est un bras robotique de l'Agence spatiale européenne installé sur le segment russe de la Station spatiale internationale (ISS). Placé en orbite en 2021, il doit devenir opérationnel fin 2022. Il est utilisé pour installer et déplacer des équipements à l'extérieur de la station spatiale, inspecter celle-ci et aller chercher des équipements en provenance de l'intérieur de la station qui auront été placés dans le sas du module Nauka. Le bras qui est long de 11,3 mètres et comporte trois articulations qui permettent 7 degrés de liberté. Il peut atteindre une pièce située à 9,7 mètres et peut déplacer un équipement d'une masse allant jusqu'à 8 tonnes. Il peut être télécommandés depuis l'intérieur ou l'extérieur de la station spatiale. Le bras devait être opérationnel dès 2011 mais son lancement a été décalé à plusieurs reprises à la suite des retards successifs dans le développement du module russe Nauka.
Équipement station spatiale
_(cropped).jpg.webp)
| Organisation | ESA |
|---|---|
| Constructeur | Airbus Defence and Space |
| Statut | En orbite |
| Lancement | 21 juillet 2021 depuis le cosmodrome de Baïkonour |
| Lanceur | Proton M P4 |
| Site |
Module russe Nauka Station spatiale internationale |
| Masse au lancement | 630 kg |
|---|
| Orbite | orbite terrestre basse |
|---|
Historique
La genèse de l'ERA remonte aux années 1980. À l'époque, l'Agence spatiale européenne planifie le développement de la navette spatiale Hermès. Ces plans prévoyaient la réalisation d'un bras robotique, baptisé HERA, chargé d'effectuer des opérations de maintenance et de manipuler des équipements depuis la navette. À la suite de l'annulation de Hermès pour des raisons budgétaires, un nouveau projet de bras robotique est étudié par l'agence spatiale pour la station spatiale russe Mir-2 qui devait succéder à Mir. En 1993, la Russie décide d'abandonner le projet Mir-2 et de participer à la réalisation de la Station spatiale internationale. Le projet de bras ERA est alors modifié pour être installé sur la partie russe de cette station. En 1996, sa réalisation se concrétise à travers un accord de coopération entre l'agence spatiale russe Roscosmos et l'Agence spatiale européenne[1]. La fabrication des principaux éléments structurels du bras, des organes terminaux (end-effectors) et des ordinateurs embarqués est confiée à la filiale hollandaise d'Airbus Defence and Space (anciennement EADS Astrium Space Transportation)[2].
Mais le projet est victime des annulations et retards pris par les développements du segment russe de la station spatiale. Le bras devait initialement être livré à la Russie durant l'été 2006 et rejoindre la Station spatiale internationale en 2010 avec le module russe Rassvet dans le cadre de la mission STS-132 de la navette spatiale américaine, mais il n'est finalement pas embarqué sur ce vol. Le lancement d'ERA est désormais associé à celui du module russe Nauka qui est le dernier module prévu pour la station spatiale. Le lancement de Nauka par une fusée Proton est planifié initialement pour mai 2012 mais à la suite de retards dans la construction et la mise au point de ce module[3] - [4], son lancement est repoussé d'année en année. Le lancement a finalement lieu le 21 juillet 2021[5] - [6] - [7]. Il constitue le troisième bras robotique installé à l'extérieur de la station spatiale internationale après Canadarm 2 et le bras japonais RMS.
Caractéristiques techniques
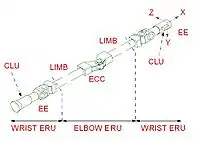
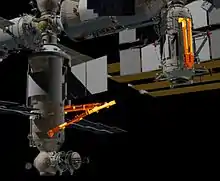
D'une longueur de onze mètres pour une masse de 630 kg, le bras ERA est capable de déplacer des charges pesant jusqu'à huit tonnes. Sa structure est réalisée en aluminium et en fibre de carbone. Il comporte trois articulations qui permettent 7 degrés de liberté. Il peut atteindre une pièce située à 9,7 mètres. Il peut être télécommandé depuis l'intérieur de la station spatiale mais également, à la demande des russes, de l'extérieur par les cosmonautes lors d'une sortie extravéhiculaire par l'intermédiaire d'un panneau de commande (EMMI) capable de résister 10 ans à son exposition au vide. Les deux extrémités du bras robotisé disposent du même dispositif permettant soit de se fixer sur des quatre points d'amarrage conçus à cet effet et disposés à la surface du module Nauka, soit d'attraper un équipement à manipuler. Ce dernier doit être équipé d'un système d'amarrage. Le bras qui a une forme symétrique peut se déplacer : une extrémité se fixe sur un point d'ancrage, puis la deuxième sur un deuxième point d'ancrage, la première se dégage alors. Chaque extrémité du bras est équipé avec une caméra infrarouge et un projecteur permettant d'éclairer la zone de travail. Deux autres caméras avec leurs projecteurs sont installées à mi-longueur. Le bras peut se déplacer à une vitesse maximale de 10 centimètres par seconde et son extrémité peut être positionnée avec une précision de 5 millimètres. Les cosmonautes pourront également s'en servir pour se déplacer. Des poignées sont installées à différents endroits du bras[8] - [9].
Utilisation
Le bras téléopéré ERA doit être utilisé pour[9] :
- Installer, retirer ou remplacer des éléments de la station spatiale ou des expériences scientifiques,
- Transférer de petites charges utiles situées à l'intérieur de la station spatiale vers l'extérieur via le sas du segment russe,
- Transférer des cosmonautes d'un emplacement à un autre,
- Soulager les cosmonautes de certaines tâches durant une sortie extravéhiculaire,
- Inspecter les parties externes de la station spatiale à l'aide des caméras.
Références
- European robotic arm european robotic arm human and robotic exploration - The International Space Station’Slatest upgrade, p. 18
- (en-US) « ERA », sur Airbus Defence & Space Dutch Technology (consulté le )
- (en) « ESA - Human spaceflight and Exploration », ESA, (consulté le )
- (en) « ISS Consolidated Launch Manifest », NASA, (consulté le )
- « Russia to launch Nauka research module to ISS in April 2021 - News - Russian Aviation - RUAVIATION.COM », sur www.ruaviation.com (consulté le )
- « Stephen Barensky : Les Russes, des partenaires si peu fiables dans le secteur spatial », sur L'Express,
- « Le bras télémanipulateur européen est envoyé dans l'espace », ESA,
- European robotic arm european robotic arm human and robotic exploration - The International Space Station’Slatest upgrade, p. 6-16
- (en) « ISS: ERA », sur EO Portal, Agence spatiale européenne,
Sources
- (en) « ISS: ERA », sur EO Portal, Agence spatiale européenne, — Page du site EO Portal consacrée au bras télécommandé.
- (en) « European robotic arm european robotic arm human and robotic exploration - The International Space Station’Slatest upgrade », Agence spatiale européenne, — Brochure de l'agence spatiale européenne consacrée au bras télécommandé.