Astrobee (Station spatiale internationale)
Astrobee est un robot volant autonome expérimental mis au point par l'agence spatiale américaine, la NASA, qui doit voler à bord de la Station spatiale internationale. Cette expérience prend la suite de SPHERES. Astrobee a été conçu pour réaliser différentes tâches à l'intérieur de la station spatiale en étant contrôlé soit par l'équipage soit par les contrôleurs sur Terre. Parmi les tâches qui pourront être confiées à Astrobee, figurent la surveillance environnementale (par exemple la mesure du niveau sonore), la réalisation d'inventaires, la prise d'images. Astrobee doit également être utilisé pour des expériences de microgravité.

Développement
Le centre de recherche Ames de la NASA a commencé à développer Astrobee en 2014. La conception de ce robot est basée sur les technologies et les expériences acquises avec les robots SPHERES qui ont été utilisés pour des expériences de microgravité et le développement d’algorithmes de métrologie, de formation de vol, de rendez-vous, d’amarrage et de décision autonome[1]. Le robot doit être mis en œuvre dans la station spatiale internationale en 2019.
Caractéristique techniques
Le robot Astrobee a la forme d'un cube de 32 centimètres de côté dont chaque coin et une partie des faces sont recouverts par un revêtement amortisseur. Sur deux faces opposées, deux ventilateurs tournant dans des sens opposés et protégés par une grille servent de système de propulsion : le souffle de l'air produit par ces ventilateurs est dirigé vers une ou plusieurs des 12 tuyères orientables qui émergent de la face. Celles-ci permettent au robot de pivoter ou de se déplacer dans chacun des trois axes. Les impératifs de sécurité ont fait l'objet d'études approfondies et la vitesse du robot est limitée à 0,75 m/s pour éviter qu'en cas de perte de contrôle, celui-ci ne vienne perforer un hublot (la partie la plus fragile de la coque pressurisée). Le robot dispose de beaucoup de volume pour installer des expériences scientifiques, car c'est un des emplois qui a rencontré le plus de succès avec SPHERES initialement conçu pour tester des logiciels de vol autonome. Les capteurs installés de manière native comprennent une caméra de navigation dotée d'un champ de vue de 116°, une caméra à haute définition disposant d'un autofocus, qui peut réaliser des vidéos transmises en temps réel au sol. Les obstacles sont détectés jusqu'à une distance de 4 mètres par des capteurs infrarouge. Un détecteur optique monté sur une des faces permet de mesurer la vitesse et de déclencher l'arrêt de la propulsion si le robot va trop vite. Deux autres caméras fixées sur la face arrière sont utilisées pour éviter les obstacles et réaliser les opérations d'amarrage[2].
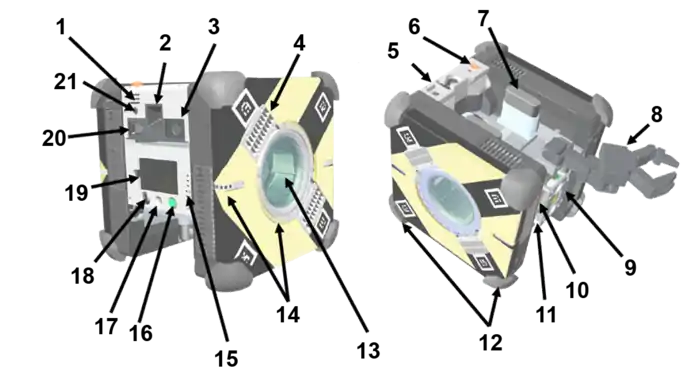
Le robot peut fonctionner de manière autonome grâce à sa programmation et à trois couches de processeurs. Les couches médiane et supérieure sont identiques mais la couche médiane tourne sous Linux et est utilisée pour piloter les fonctions centrales d'Astrobee tandis que la couche supérieure, qui tourne sous Android, est utilisée pour faire fonctionner les expériences scientifiques embarquées. Cela permet de développer des applications facilement grâce à un grand nombre d'API disponibles sous Android. Dans la mesure où le robot se déplace dans un environnement complètement défini et à l'abri de perturbations, son logiciel lui permet de se situer dans la station en rapprochant une carte mémorisée et des images prises avec une seule caméra. Lorsqu'il n'est pas utilisé, le robot s'amarre sur un support développé pour son usage qui lui permet de recharger ses batteries. Le robot dispose d'un bras rétractable qui lui permet de s'amarrer sur une des mains courantes installées un peu partout dans la station spatiale pour permettre aux astronautes de se déplacer en apesanteur. L'amarrage se fait automatiquement. Une fois amarré, le robot peut arrêter les ventilateurs ce qui permet d'allonger de 80% la durée de vie de ses batteries. En position amarrée, le robot peut par exemple être utilisé comme une caméra contrôlée à distance : le bras dispose de moteurs qui permettent de modifier l'orientation du robot et donc de la caméra. Des leds fournissent des informations sur les opérations en cours et si celui-ci est télécommandé à distance ou fonctionne de manière autonome[2].
Références
- (en) « NASA Facts : Space Technology Game Changing Development Astrobee: ISS Robotic Free Flyer » [PDF], NASA (consulté le )
- (en) Evan Ackerman, « How NASA's Astrobee Robot Is Bringing Useful Autonomy to the ISS », sur IEEE Spectrum, IEEE,