Tout ou rien
En automatique, le concept TOR (tout ou rien) se ramène au binaire : 0 ou 1. Cela signifie que l'information à traiter ne peut prendre que deux états (marche-arrêt). Seuls ces deux niveaux logiques sont possibles, d'où l'appellation commande tout ou rien (en anglais : bang–bang-control ou on–off-control).
On trouve par exemple des capteurs de type TOR (tout ou rien, en anglais : digital sensor) dans l'industrie pour la détection de présence d'objets, ces capteurs ne renverront que deux niveaux logiques :
- 0 = absence d'objet
- 1 = présence d'objet
Un interrupteur électrique, un thermostat constituent des dispositifs tout ou rien. Lors d'un choix d'action, le processus de choix amenant à décider d'aller dans un bar à bar ou de ne pas y aller, relève d'une logique tout ou rien.
Principe de fonctionnement de la commande TOR (tout ou rien)
Considérons un système possédant une entrée E , et une sortie S telles que :
- E ne prend que deux valeurs possibles : 0 ou bien 1
- E = 1 implique : S augmente
- E = 0 implique : S diminue
Exemple 1, pièce chauffée en hiver par un radiateur
- E = 1 → le radiateur chauffe → la température S augmente
- E = 0 → le radiateur est à l'arrêt → la température S diminue (à cause des fuites thermiques, la température ne peut jamais rester constante)
Cahier des charges : on désire que la grandeur S reste comprise entre deux valeurs Smin et Smax
Solution : constituons un régulateur TOR fonctionnant selon l'algorithme suivant :
Algorithme TOR (qui est exécuté périodiquement avec une période égale à P secondes) :
SI (S <= Smin)
E = 1;
SINON
SI (S >= Smax)
E = 0;
FIN_SI
FIN_SI_SINON
On constate que pour Smin < S < Smax, la valeur de E est inchangée (E garde sa valeur précédente qui était soit 1, soit 0). S varie ainsi dans la plage [Smin, Smax].
Pour la température d'une pièce, on peut choisir
- Smin = 19,2 degrés et Smax = 19,8 degrés quand la pièce est (ou va être) occupée, afin d'obtenir une température moyenne de 19,5 degrés (à 0,3 degré près),
- une consigne [Smin, Smax] plus proche de 10 °C quand la pièce n'est pas occupée d'ici à la prochaine heure.
La période P d’exécution de l'algorithme sera choisie en fonction de la dynamique du système à réguler (pour réguler la température d'une pièce ou d'un four, on peut choisir P > 10 secondes).
Exemple 2, hacheur à courant continu (improprement dit transformateur à courant continu)
On suppose :
- U = tension d'alimentation constante (sur le schéma : c'est la tension entre les pôles - et + de la batterie)
- t = temps
- T = période du hacheur
- f = fréquence du hacheur, donc f = 1/T
- a = rapport cyclique du hacheur = nombre réel pouvant varier de 0 à 1
- u(t) = UM = tension de sortie du hacheur (on verra qu'elle dépend du rapport cyclique a)
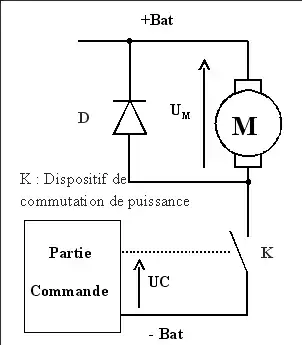
L'interrupteur électronique K du hacheur est commandé ainsi (pour 0 < t < T) :
SI (t <= a.T)
K = 1; // interrupteur fermé, donc u(t) = U
SINON
K = 0; // interrupteur ouvert, donc u(t) = 0
FIN_SI
Il est fréquent de choisir une période T < 0,001 seconde, donc une fréquence f > 1 000 hertz, ce qui explique que l'interrupteur K ne soit pas mécanique, mais électronique (transistor ou thyristor).
On peut ainsi démontrer que, durant la période T, la valeur moyenne de u(t) vaut u_moyen = a.U.
En modifiant la valeur du rapport cyclique a, on peut faire varier la luminosité d'une lampe, la vitesse d'un moteur à courant continu, le fonctionnement d'un four à micro-ondes, etc.
Au plan énergétique, ce genre de dispositif remplace avantageusement les rhéostats.
Variante "tout ou peu"
Dans certains cas, comme en matière de ventilation, une commande 1 signifiera une sortie S, la commande 0 signifiant une sortie réduite, par exemple S/10.