Système continu
Un système continu est un système mettant en jeu des signaux continus. Ils ont les mêmes propriétés qu'une fonction continue.
On parle de systèmes continus par opposition aux systèmes discrets (quand on travaille en numérique par exemple). En effet, les appareils numériques nécessitent un échantillonnage (fini) de données pour pouvoir manipuler des données analogiques (continu).
Systèmes linéaires
Un système linéaire en automatique est un système qui a les propriétés suivantes :
- principe de superposition : si l'entrée du système se décompose en une somme de plusieurs entrées alors la sortie du système sera la somme des sorties correspondant à chaque entrée séparée.
- causalité : toutes les valeurs sont nulles avant le début de l'expérience (correspondant à l'application de la première consigne).
Pour résumer, un système est linéaire s'il peut être modélisé par des fonctions de transferts linéaires.
Fonctions de transfert
Une fonction de transfert est une fonction qui permet de calculer la sortie en fonction de l'entrée.
Prenons un exemple simple : un circuit électrique.
On alimente une lampe avec un générateur de tension. L'intensité de l'éclairage dépend du courant qui circule dans la lampe.
L'entrée est donc la tension (ce qu'on peut commander) et la sortie est l'intensité du courant dans la lampe.
La lampe est assimilable à une résistance. On sait que donc la fonction de transfert donnant la sortie en fonction de l'entrée est .


Les fonctions de transfert peuvent être beaucoup plus compliquées. Elles peuvent mettre en jeu des dérivées ou des intégrales (ces transformations sont linéaires).
Pour simplifier l'étude de systèmes linéaires compliqués, on utilise la transformée de Laplace de la relation entrée-sortie.
On obtient alors un quotient qu'il suffit de multiplier à la transformée de Laplace de l'entrée pour obtenir la transformée de Laplace de la sortie. Une simple transformée inverse nous donne la sortie.
Systèmes non linéaires
Un système non linéaire est un système qui présente un aspect non linéaire, par exemple une saturation. Dans ce cas, on ne peut pas déterminer de transformée de Laplace. Il devient compliqué de l’étudier.
On utilise alors souvent le cas par cas. On essaie de décomposer la partie non linéaire en plusieurs parties linéaires et les étudier séparément.
Prenons par exemple un robinet. Le débit de l’eau qui coule dépend de l’ouverture, mais il arrive un moment où la pression qui existe dans les canalisations n’est plus suffisante (qui n’a jamais vécu le coup de la douche située au dernier étage qui ne laisse passer qu’un mince filet d’eau ?). On a beau continuer de dévisser le robinet, l’écoulement restera le même. Si l’écoulement est proportionnel à l’angle d’ouverture du robinet, on aura une fonction qui se schématisera ainsi :
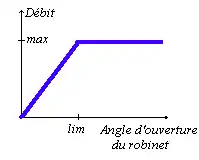
On peut alors décomposer le comportement en deux systèmes linéaires :
- Dans le cas où l’ouverture du robinet est inférieure à « lim ». On a alors une simple relation de proportionnalité entre les deux variables.
- Dans le cas où l’ouverture du robinet est supérieure à « lim ». Le débit à donc une valeur constante (« max ») qui est indépendante de l’ouverture.
On peut ainsi étudier le système comme un système linéaire dont les caractéristiques dépendent du régime de fonctionnement en tenant compte des passages d’un régime à un autre.