Synchronous Ethernet
Synchronous Ethernet, plus connu sous l'acronyme SyncE (ou Synchronisation par Ethernet en français), est un standard de l'UIT pour les réseaux informatique et de télécommunications qui facilite le transfert de signaux d'horloge sur la couche physique Ethernet. Ce signal peut être dérivé d'une horloge de référence (horloge atomique ou issue d'un lien SDH par exemple) et être propagé de manière fiable et synchrone vers d'autres horloges réseaux.
Description
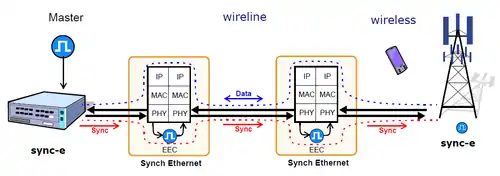
Le but de SyncE est de fournir un signal de synchronisation aux éléments d'un réseau qui peuvent éventuellement avoir besoin de ce type de signal. Le signal SyncE transmis sur la couche physique Ethernet doit être dérivé d'une horloge externe de référence, idéalement une unique horloge commune à l'ensemble du réseau. Les applications sont diverses, et comprennent notamment les technologies d'accès telles que les réseaux cellulaires (téléphonie mobile), les réseaux point-à-point avec de la fibre optique, l'IPTV ou encore les communications par VoIP.
Contrairement aux réseaux de type multiplexage temporel, les réseaux de la famille Ethernet ne transportaient pas nativement d'informations de synchronisation d'horloge. Plusieurs méthodes sont définies pour résoudre ce problème. Le Network Time Protocol de l'IETF et le Precision Time Protocol définis dans les normes IEEE 1588 de 2008 en font partie.
SyncE a été standardisé par l'UIT (Union internationale des télécommunications) en coopération avec l'IEEE sous la forme de trois recommandations :
- G.8261 (en) définit les aspects de l'architecture et de la synchronisation des réseaux SyncE[1] ;
- ITU-T Rec. G.8262 spécifie les caractéristiques de rythme des horloges d'équipement Ethernet synchrone[2] ;
- UIT-T Rec. G.8264 décrit la spécification de l'Ethernet Synchronisation Messaging Channel (ESMC)[3].
L'architecture SyncE nécessite au minimum le remplacement de l'horloge interne de la carte Ethernet par une boucle à verrouillage de phase afin d’alimenter le PHYceiver.
Horloges
La définition d’horloge de la recommandation UIT-T G.8262 rend les horloges Ethernet synchrones compatibles avec les horloges SDH. Basées sur les horloges de l'UIT-T G.813, celles de SyncE sont définies en termes de précision, de gigue, de transmission de bruit, d'efficacité, de tolérance au bruit et de génération de bruit. Ces horloges sont appelées Ethernet Equipment Slave clocks (EEC).
La recommandation G.8262/Y.1362 (publiée en , amendée en 2008 et 2010) de l'UIT pour le SyncE définit les caractéristiques de synchronisation des EEC ( Ethernet Equipment slave Clock)[4].
Canal de messagerie

Dans les réseaux SDH, les Synchronization Status Message (SSM) constituent un système pour synchroniser les signaux ; SyncE implémente donc les fonctionnalités des SSM afin de permettre une interopérabilité complète avec les équipements fonctionnant en SDH.
Les messages SSM sont transportés dans les réseaux SDH à des emplacements fixes des trames. Cependant, Il n'y a pas d'équivalent aux trames fixes dans SyncE. Les mécanismes mis en œuvre pour le transport de SSM à travers un réseau Ethernet synchrone sont définis par l'UIT dans la recommandation G.8264, réalisé en collaboration avec l'IEEE. Celui-ci présente l'Ethernet Synchronization Message Channel (ESMC), qui est basé sur le protocole Organization Specific Slow Protocol (OSSP), spécifié dans le standard IEEE 802.3ay. L'ITU-T G.8264 définit des messages récurrents qui fournissent une indication permanente du niveau de qualité de l'horloge. Cependant, des messages avec le nouveau niveau de qualité SSM sont également émis.
Le protocole ESMC est composé de l'entête standard d'Ethernet, d'un entête spécifique définie par l'UIT, d'un emplacement pour des paramètres et d'une structure de Type Length Value (TLV)[5].
Architectures de synchronisation
Une des exigences principales de SyncE était que n'importe quel élément réseau doit avoir au moins deux horloges de référence ; de plus, les interfaces Ethernet doivent être capables de générer leur propre signal de synchronisation dans le cas où ils perdraient les signaux de référence externes. Si c'est le cas, il est dit que l'élément réseau est dans l'état de holdover (mémorisation et maintien de la dernière fréquence de synchro reçue).
Le signal de synchronisation doit être filtré et régénéré par une boucle à phase asservie au niveau des nœuds Ethernet, car il se dégrade lorsqu'il traverse le réseau.
Topologies de réseau
Les réseaux de synchronisation et de transport sont partiellement mélangés, car certains éléments réseau transmettent à la fois des données et des signaux d'horloges à d'autres éléments réseau. Les topologies les plus courantes sont :
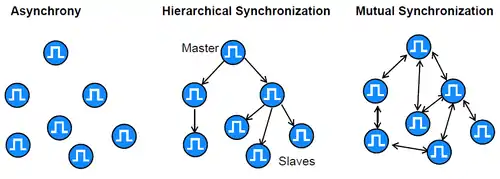
- Arbre : C'est une topologie basique qui repose sur une horloge maîtresse qui sert de référence à toutes les autres horloges esclaves. Il y a deux points faibles : cela repose entièrement sur une seule horloge et le signal est progressivement dégradé ;
- Anneau : Dans les faits, c'est une topologie en arbre qui utilise une configuration en anneau pour propager le signal de synchronisation. Ce modèle permet de rendre un arbre plus sécurisé, mais une attention particulière doit être portée pour éviter la formation de boucles de synchronisations ;
- Mailles : Dans cette topologie, chaque horloge est interconnectée à plusieurs autres afin d'avoir une redondance en cas de panne. Cependant, des boucles de synchronisation se produisent facilement et doivent être évitées.
Les réseaux SyncE ne possèdent en règle générale pas qu'une seule topologie, mais plutôt une combinaison de plusieurs d'entre elles. Avoir plusieurs horloges maîtres permet une duplication et ainsi d'augmenter la sécurité ; c'est une caractéristique importante des réseaux modernes. Le but est de minimiser les problèmes associés au transport du signal, et d'éviter de dépendre d'une unique horloge en cas de problème. Cela permet d'obtenir un réseau de synchronisation extrêmement précis, redondant, et solide.
Interconnexion de nœuds
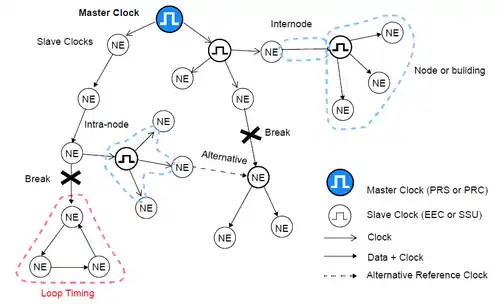
Il y a deux façons de base pour distribuer la synchronisation :
- Intra-nœud, responsable de la synchronisation des éléments réseaux à l'intérieur d'un nœud ;
- Inter-nœud, où le signal de synchronisation est envoyé à un autre nœud par une connexion spécialement assignée à cette tâche, ou par un signal PHY.
Plusieurs types de réseaux peuvent être utilisés pour transporter les signaux de synchronisation et peuvent être combinés dans les faits. Les principaux réseaux étant T1/E1, SONET/SDH, et SyncE. Cependant le standard Ethernet d'origine n'est pas adapté pour transmettre des signaux de synchronisation. Ceci est important car si le signal traverse une section d'Ethernet standard, alors la synchronisation est perdue[5].
Signaux de synchronisation
Il y a de nombreux signaux adaptés à la synchronisation :
- Signal analogique, à 1.544 ou 2,048 MHz ;
- Signal numérique, à 1.544 ou 2,048 Mbit/s ;
- Signal SyncE à n'importe quel débit binaire.
Notes et références
- (en) « Timing and synchronization aspects in packet networks - Recommendation ITU-T G.8261/Y.1361 » [PDF], sur UIT (consulté le )
- (en) « Timing characteristics of synchronous Ethernet equipment slave clock (EEC) - ITU-T Recommendation G.8262/Y.1362 » [PDF], sur UIT (consulté le )
- (en) « Distribution of timing information through packet networks - Recommendation ITU-T G.8264/Y.1364 » [PDF], sur UIT (consulté le )
- « G.8262 : Timing characteristics of a synchronous Ethernet equipment slave clock », sur Union internationale des télécommunications,
- Jacques Baudron, « SYNCE, LE « SYNCHRONOUS ETHERNET » » [PDF], (consulté le ), p. 9 à 13
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Synchronous Ethernet » (voir la liste des auteurs).