STS-123
La mission STS-123 à bord de la navette spatiale Endeavour avait pour destination la station spatiale internationale (ISS). STS-123 était la mission d'assemblage 1J/A ISS. La date initiale de lancement était le mais, après le report de STS-122, la navette fut lancée le . C'était la 122e mission d'une navette spatiale et la 25e à destination de l'ISS. Il s'agissait de livrer le premier module du laboratoire japonais (Kibō) ainsi que le bras robotique canadien (Special Purpose Dexterous Manipulator-SPDM). La mission dura 15 jours et 18 heures. Ce fut la première mission à utiliser complètement le Station-to-Shuttle Power Transfer System (SSPTS), qui permet à la station de fournir de l'énergie à la navette. Cette mission constitue aussi un record pour la durée d'arrimage de la navette à la station[1].
| STS-123 | ||
 | ||
| Données de la mission | ||
|---|---|---|
| Vaisseau | Navette spatiale Endeavour |
|
| Équipage | 7 hommes | |
| Date de lancement | ||
| Site de lancement | Kennedy Space Center Pas de tir 39A |
|
| Date d'atterrissage | ||
| Site d'atterrissage | Kennedy Space Center, Floride |
|
| Durée | 15 jours et 18 h | |
| Orbites | 250 | |
| Altitude orbitale | 341 km | |
| Inclinaison orbitale | 51.6° | |
| Distance parcourue | 10 585 900 km | |
| Photo de l'équipage | ||
 Devant : Johnson et Gorie Derrière: Linnehan, Behnken, Reisman, Foreman et Doi. | ||
| Navigation | ||
Équipage
- Commandant : Dominic Gorie (4)
 États-Unis
États-Unis - Pilote : Gregory H. Johnson (1) États-Unis
- Spécialiste de mission 1 : Richard M. Linnehan (4) États-Unis
- Spécialiste de mission 2 : Robert Behnken (1) États-Unis
- Spécialiste de mission 3 : Michael Foreman (1) États-Unis
- Spécialiste de mission 4 : Takao Doi (2)
 Japon
Japon
Uniquement à l’aller :
- Ingénieur de vol Garrett E. Reisman (1) États-Unis
Uniquement au retour :
- Ingénieur de vol Léopold Eyharts (2)
 France de l'ESA
France de l'ESA
Le chiffre entre parenthèses indique le nombre de vols spatiaux effectués par l'astronaute, STS-123 inclus.
Paramètres de la mission
- Masse :
- Navette au décollage : 122 364 kg
- Navette à l'atterrissage : 94 158 kg
- Périgée : 336 km
- Apogée : 346 km
- Inclinaison : 51,6°
- Période : 91,6 min
Objectifs
STS-123 a transporté et livré à l’ISS une partie du laboratoire japonais Kibo (le module logistique pressurisé du laboratoire ou ELM-PS) qui servira à des expériences scientifiques en apesanteur.
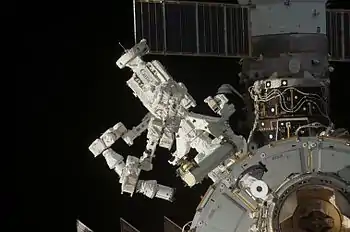
La mission a transporté aussi le manipulateur agile spécialisé, ou la main canadienne ("Dextre"), un robot à deux bras (3,3 m) capable de réaliser des tâches d'assemblage, d'arrimage et d'entretien de la station.
.jpg.webp)
Charge utile
| Localisation | Désignation | Poids |
| Bay 1-2 | Orbiter Docking System EMU 3003 / EMU 3004 |
1 800 kg ~260 kg |
| Bay 3P | Shuttle Power Distribution Unit (SPDU) |
~100 kg |
| Bay 3S | Canadarm2 Yaw Joint | 336 kg |
| Bay 4P | MISSE (en) PEC 6a | 103 kg |
| Bay 4S | Direct Current Switching Unit (DCSU) | 363 kg |
| Bay 5P | MISSE (en) PEC 6b | 103 kg |
| Bay 5S | Direct Current Switching Unit (DCSU) | 363 kg |
| Bay 6S | Standard Interface Panels | ? |
| Bay 7-8 | Dextre on Spacelab Pallet | 3 485 kg |
| Bay 9P | ECSH (EVA Cargo Stowage) on APC | ~100 kg |
| Bay 10-12 | Kibo ELM-PS | 8 484 kg |
| Bay 11S | Standard Interface Panels | ? |
| Bay 13P | Lightweight adapter plane for MISSE | 244 kg |
| Bay 13S | USAF RIGEX experiment | 315 kg |
| Starboard Sill | Orbiter Boom Sensor System | ~450 kg |
| Port Sill | Canadarm | 410 kg |
| Total : | 16 916 kg |
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « STS-123 » (voir la liste des auteurs).
Liens externes
- (en) Mission STS-123 Nasa