Roue mecanum
Les roues mecanum sont un type de roues omnidirectionnelles permettant à un véhicule de se diriger dans toutes les directions : aussi bien sur le côté que vers l'avant et l'arrière. Ces roues ont été inventées par le suédois Bengt Ilon en 1973, alors employé par la société Mecanum AB.


Description et fonctionnement
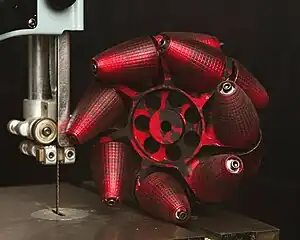
Chaque roue (3[1] minimum) est motorisée, commandée en vitesse chacune indépendamment des autres, en fonction du mouvement à produire. Elles sont placées généralement en position évoquant un rectangle. Les axes principaux de rotation des roues sont parallèles. À la périphérie de chaque roue, de petites roulettes non motorisées (en rotation libre) sont placées à 45°.
Les mouvements possibles sont :
- une translation vers l'avant/arrière (mouvement classique d'une roue), en faisant tourner toutes les roues ensemble dans le même sens,
- un mouvement de rotation pure, en faisant tourner les roues droites et gauches en sens opposé,
- une translation vers la droite/gauche, en faisant tourner la roue avant droite et la roue arrière gauche dans le sens opposé à la roue avant gauche et la roue arrière droite.
Ces mouvements peuvent être combinés en étant réalisés simultanément.
Liens internes
Liens externes
- Le brevet américain de Bengt Erland Ilon Wheels for a course stable selfpropelling vehicle movable in any desired direction on the ground or some other base (.pdf file) April 8 1975
- Une démonstration, réalisée par un chariot élévateur.
Notes et références
- (en) Yunwang Li, Sumei Dai, Lala Zhao et Xucong Yan, « Topological Design Methods for Mecanum Wheel Configurations of an Omnidirectional Mobile Robot », Symmetry, vol. 11, no 10, , p. 1268 (DOI 10.3390/sym11101268, lire en ligne, consulté le )