Roue holonome
Une roue holonome ou roue omnidirectionnelle ou omni-roue est un mécanisme constitué d'un moyeu disposant d'un chapelet de galets répartis sur sa périphérie. Utilisée pour les plateformes robotiques ou les engins de manutention, elle confère au véhicule des possibilités de déplacements dans un espace plus compact. Sur de tels engins, les axes de roues sont fixes : le mouvement global du chariot dépend uniquement de la combinaison des mouvements de rotation de chaque roue.

Les lois de commandes dépendront du nombre de roues, de leur disposition, et de la configuration des axes de galets.
Architecture de roue
Les roues peuvent se classifier suivant la répartition des axes de galets par rapport à l'axe de rotation du moyeu ; on distingue :
- répartition tangentielle des galets : dans ce cas les axes de galets constituent un polygone plan fermé. La forme des galets est en olive de telle sorte que le contour apparent de la roue est un cercle. Souvent on disposera de plusieurs rangées, en quinconce, qui permettent un meilleur relais de l'appui d'un galet à l'autre ;
- répartition en hélice : les axes des galets sont tangents à une hélice. Ils sont tous inclinés du même angle par rapport à l'axe de la roue.
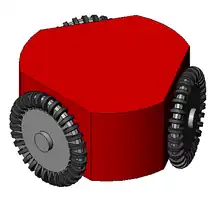
Disposition des roues
Contrairement aux roues Mecanum, les roulettes ne sont pas orientées à 45°, mais à 90°. Les axes des roues se croisent au centre du véhicule. Il y a généralement 3 ou 4 roues.

Lois de commande et mouvements
Les lois de commandes s'établissent en posant une loi de composition des vecteurs vitesses au point de contact roue/sol. Le problème admet une solution si les vitesses du véhicule sont cinématiquement admissibles.