Résolveur (électrotechnique)
La notion résolveur désigne dans l'électrotechnique un transducteur électromagnétique pour le changement d'angle d'un rotor en une valeur électrique[1].
Principe général
Le fonctionnement décrit ci-dessous correspond à un résolveur transmetteur vitesse 1 qui est l'utilisation de base.
À l'extérieur, un résolveur ressemble à un moteur électrique avec un rotor et un stator. À l'intérieur, les arrangements sont différents.
Le rotor et le stator sont composés de paquet de tôles bobinées.
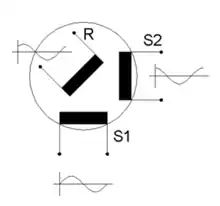
Le rotor comporte généralement le bobinage primaire. Le stator comporte alors les deux bobinages secondaires (bobinage diphasé, c'est-à-dire décalés de 90° électriques).
Rq : le résolveur est l'équivalent diphasé du synchro.
Le résolveur fonctionne comme un transformateur dont le couplage varie avec l'angle mécanique du rotor. Lorsqu'on excite le bobinage rotor avec une tension alternative on récupère deux tensions alternatives sur les bobinages secondaires.
Amplitude des signaux
L'amplitude des deux tensions induites varie sinusoïdalement lors de la rotation du rotor. Les deux bobinages étant décalés de 90° l'un fournit une tension dont l'amplitude est proportionnelle au sinus de l'angle du rotor, et l'autre au cosinus.
- UR(t) = U⋅sin(ωt)
- US1(t) = K⋅U⋅sin(α)⋅sin(ωt+φ)
- US2(t) = K⋅U⋅cos(α)⋅sin(ωt+φ)
Où :
- U est l'amplitude de la tension d'entrée,
- K le rapport de transformation du résolveur,
- φ le déphasage entre la tension d'entrée et la tension de sortie,
- α l'angle mécanique du rotor.
En prenant les composantes en phase avec la tension d'entrée déphasée de φ :
- US1 = K⋅UR⋅sin(α)
- US2 = K⋅UR⋅cos(α)
Résolveur sans balais (brushless)
Le type de résolveur actuellement le plus répandu est le résolveur transmetteur sans balais. C'est un résolveur qui comporte un transformateur tournant.
- Le stator comporte, de même que précédemment, les deux bobinages secondaires diphasés. Il comporte aussi une armature, située au-dessus, qui est la bobine primaire du transformateur tournant.
- Le rotor comporte aussi une bobine au-dessus du paquet de tôles bobiné.
Lorsqu'on excite la bobine du transformateur stator, une tension est induite dans la bobine secondaire du rotor. Celle-ci va alimenter la bobine du rotor du résolveur. Le fonctionnement est alors identique au résolveur transmetteur.
Ce type de résolveur permet d'alimenter le bobinage rotorique sans passer par des câbles, qui limiteraient la rotation, ou par un système balais collecteur qui est une pièce d'usure.
Résolveur multi-vitesses
Un résolveur de base a typiquement deux pôles et est appelé résolveur vitesse 1 (1 pour une paire de pôle). Cela signifie que pour un tour mécanique du rotor on a un cycle électrique sur les tensions de sorties. L'angle de sortie est directement l'angle du rotor. Ces résolveurs peuvent donc délivrer une information de position angulaire absolue.
Les résolveurs multivitesses délivrent plusieurs cycles électriques par tour : par exemple 16 pour une vitesse 16 (2x16 = 32 poles).
angle électrique = angle mécanique * p
où p est le nombre de paires de pôles.
La précision angulaire mécanique est alors plus précise mais l'information n'est plus absolue. Ainsi un résolveur vitesse 1 peut avoir une précision de 5' d'arc, alors qu'une vitesse 16 peut atteindre jusqu'à 10" d'arc.
Certains résolveurs contiennent un bobinage vitesse 1 pour la position absolue et un bobinage multivitesse pour la précision.
Fonctions
La fonction présentée plus haut est la fonction transmetteur.
D'autres fonction de résolveurs sont :
- résolveurs récepteurs
Ces résolveurs sont utilisés dans le sens inverse du résolveur transmetteur. Les deux bobinages diphasés sont alimentés chacun avec une tension alternative. Le rapport entre la tension sinus et la tension cosinus détermine l'angle électrique. Le système tourne le rotor pour obtenir une tension nulle sur le bobinage rotor. À cette position, l'angle mécanique du rotor est égal à l'angle électrique appliqué sur le stator.
- résolveurs différentiels
Ces résolveurs combinent un bobinage diphasé primaire sur le rotor, comme le récepteur, et un bobinage diphasé sur le stator, comme le transmetteur, ou inversement. L'angle électrique mesuré sur le bobinage secondaire est la différence entre l'angle mécanique du rotor et l'angle électrique du primaire. Ce résolveur peut être utilisé pour effectuer des opérations trigonométriques.
Notes et références
- [PDF]Codeurs de position pour moteur, sur cours.bts-electrotechnique.fr, consulté le 18 février 2017