Mouvement hélicoïdal
Un mouvement hélicoïdal est une combinaison d'une translation et d'une rotation.
On distinguera le mouvement mathématique du mouvement hélicoïdale volumique, c'est-à-dire un objet qui tourne sur lui-même en avançant, telle une vis qu'on enfonce. Dans un tel cas, le centre de gravité de l'objet suit une ligne droite.
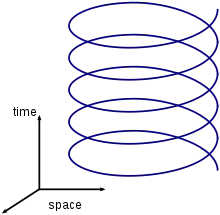
En mathématiques, le mouvement de l'hélicoïde est défini par les équations paramétriques (en fonction du temps) suivantes[1] :
- X = R.cos (ω.t)
- Y = R.sin (ω.t)
- Z = a.t
R, ω et a étant des constantes. R défini le rayon de la rotation, ω la vitesse de rotation, a la vitesse de translation.
Elles peuvent être définie en coordonnées cylindriques (ρ, ϕ et z)[2] :
- ρ = R
- z = Aϕ.t
On peut utiliser l'image d'une fourmi marchant à vitesse constante le long d'un ressort, ou un point sur une hélice d'un avion en marche.
Le mouvement hélicoïdal est un cas particulier du mouvement d'hélice, pour lequel le rayon peut être variable.
Voir aussi
Notes et références
- « Mouvement hélicoïdal », Simulation numérique d'un mouvement hélicoïdal
- « mouvement hélicoïdal », sur université virtuelle de Tunis