Mécanisme de Jansen
Le mécanisme de Jansen est un mécanisme à jambes plan conçu par le sculpteur cinétique Theo Jansen en 1991[1] afin de simuler un mouvement de marche régulier[2]. Le mécanisme de Jansen, outre le mérite artistique, présente l’intérêt de la simulation de la marche grâce à une simple rotation comme mouvement d’entrée[3].
| Mécanisme de Jansen | |
 Superposition de deux représentations du mécanisme de Theo Jansen pour deux positions de la manivelle | |
| Inventé par Theo Jansen | en 1991[1] |
|---|---|
| Domaine d'application | Transport, art |
| Site internet | https://www.strandbeest.com/ |

Jansen utilisa son mécanisme dans une variété de sculptures cinétiques qui sont connues sous le nom de Strandbeesten[4] (bêtes de plage en néerlandais). Très légères, celles-ci peuvent se déplacer sur un plan horizontal sous l'action du vent, ou sur un plan incliné sous l'action du poids de la sculpture.
Fonctionnement
Le seul actionneur du mécanisme de Jansen est un moteur rotatif qui fait tourner la manivelle centrale (ou, dans l'exemple des structures de l'artiste, une voile articulée convertissant la force du vent en un mouvement rotatif). Toutes les pièces étant reliées par des liaisons pivots, cela entraîne le mouvement de l'ensemble du mécanisme. Les positions de l'ensemble des pièces étant données uniquement par l'angle de la manivelle, il s'agit d'un mécanisme à un unique degré de liberté.
Modélisation
Les propriétés cinématiques et dynamiques du mécanisme Jansen ont été modélisées de façon exhaustive en utilisant la méthode d'intersection des cercles (si deux barres sont liées ensemble, on connaît leur position en traçant deux cercles de rayons respectifs les longueurs des barres), et des graphes de liaisons[5].
Illustrations
 Animation avec une jambe
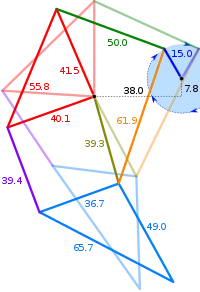
Animation avec une jambe Longueur des barres
Longueur des barres Animation avec six jambes
Animation avec six jambes
Références
- (en) « Explains – Strandbeest » [« Explications – Strandbeest »], sur strandbeest.com (consulté le )
- (en) Edgar Alonso Martínez García, Numerical Modelling in Robotics, OmniaScience, , 466 p. (ISBN 978-84-942118-8-1, lire en ligne), « 13 », p. 336
- (en) Daniel Giesbrecht, « Design and optimization of a one-degree-of-freedom eight-bar leg mechanism for a walking machine » [« La conception et l'optimisation d'un mécanisme à jambes à un degré de liberté, huit barres pour une machine ambulante »], Université du Manitoba, (consulté le ) : « While legged walking mechanisms have been designed and built based on engineering theories, they have also attracted much attention from the art fields. The kinetic sculpture “Wind Beast” is a multi-legged walking mechanism powered by wind. It was created by Mr. Theo Jansen, a Dutch kinetic sculptor. The mechanism has many advantages from the design viewpoint, such as: it has a SDOF, a crank as an input link and an ovoid foot path. Also, two legs are in pair and are mirrored, where they share the same crank as the input link. This is beneficial because a central shaft can be used to operate all the legs without adding extra actuators. »
- (en) « Strandbeest - Genealogy » (consulté le )
- (en) Lalit Patnaik et al., « Kinematics and dynamics of Jansen leg mechanism: A bond graph approach. » [« Cinématique et dynamique du mécanisme à jambes de Jansen : une approche par graphe de liaisons »], Simulation Modelling Practice and Theory, vol. 60, , p. 160–169 (DOI 10.1016/j.simpat.2015.10.003)
Liens externes
- Animations et comparaison des mécanismes de Jansen et Klann : « mechanicalspider.com »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?)
- Le Strandbeest de Theo Jansen
- Mécanisme de Strandbeest de Theo Jansen (en allemand)
- Exergia - Simulation von Theo Jansen's Strandbeest (en anglais)
- Strandbeest créé avec GeoGebra
- Shadertoy 2D
- Shadertoy 3D
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Jansen's linkage » (voir la liste des auteurs).