ArduSat
ArduSat est un Nanosatellite open source Arduino, basé sur les stantards CubeSat. Il contient un ensemble de capteurs et de cartes Arduino. À travers ces satellites, le grand public pourra effectuer des expériences dans l'espace.
| Type de mission | Scientifique grand public |
|---|---|
| Lancement | 3 août 2013 |
| Insertion en orbite | 19 novembre 2013 |
| Site | Nanosatisfi.com |
| Masse au lancement | 1 kg |
|---|
| Altitude | 400-500 kilomètres |
|---|
ArduSat a été créé par Nanosatisfi LLC, une entreprise aérospatiale créée par 4 étudiants diplômés de l'International Space University en 2012 et qui, d'après les propres termes de Phil Plait[1], a pour « but de démocratiser l'accès à l'espace ».
ArduSat est le premier satellite open source fournissant un accès vers l'espace auprès du grand public[2].
Chronologie du projet


.jpg.webp)
| Date | Event |
|---|---|
| 15 juin 2012 | Lancement de la campagne de financement participatif sur Kickstarter. L'objectif initial était d'obtenir 35 000 $. |
| 15 juillet 2012 | Après 30 jours de campagne, le projet a obtenu un montant total de 106 330 $ venant de 676 contributeurs. |
| aout 2012 | Design du prototype ArduSat[3]. |
| 27 octobre 2012 | Test du prototype Ardusat en haute-altitude[4]. "Le prototype ArduSat a été envoyé à 85 000 pieds(25 000 m), sur un ballon à haute-altitude. Durant le vol, qui dura un peu plus de deux heures, le prototype lança des programmes d'essai, des tests sur les capteurs, et prit même des photos sur la haute stratosphère."[5] |
| 20 novembre 2012 | Un accord est signé entre Nanosatisfi et Nanoracks pour le déploiement des deux premiers mini-satellites sous le programme Ardusat avec la NASA et le/la JAXA, un premier durant l'été 2013, l'autre durant l'automne 2013. Cela fit de l'Ardusat le "premier déploiement commercial d'un satellite Américain depuis la Station Spatiale Europeene"[6] |
| Décembre 2012 | Design d'un "modèle de moteur du satellite avec Design of "an engineering model of the satellite with flight-hardware equivalent components"[3]. |
| 20–21 avril 2013 | La NASA intègre Ardusat dans son International Space Apps Challenge. L'objectif du challenge est d'étendre les fonctionnalités de la plateforme Ardusat, présentée comme "un satellite open source offrant un accès à l'espace à la demande". 22 projets furent soumis à l'ArduSat Challenge. |
| 14 mai 2013 | Parution de la première version de l'ArduSatSDK sur GitHub. Ce SDK accessible au grand public dans le but de proposer et de développer des expériences sur la plateforme Ardusat. |
| Mai–juillet 2013 | Assemblage et tests de la version finale d'ArduSat-1 et ArduSat-X[3]. |
| 3 aout 2013 | Lancement d'ArduSat-1 et ArduSat-X à bord du lanceur H-IIB No. 4 depuis Y2 au Japon, à 19:48:46 UTC[7] |
| 9 aout 2013 | Le cargo spatial H-IIB (HTV-4) est récupéré par le bras robotisé de l'ISS Canadarm 2 à 11:22 UTC, dirigé vers port de l'Harmony node faisant face à la terre, et finalement installé sur son point d'accostage à 18:38 UTC[8] - [9]. |
| 30 aout. - 3 septembre 2013 | ArduSat-1 and ArduSat-X sont transférés dans l'ISS depuis le cargo inclus dans le "HTV-4 Pressurized Logistics Carrier" (PLC)[10] - [11] |
| 15 novembre 2013 | L'ingénieur de vol "Mike Hopkins" installe le "Japanese Experiment Module Small Satellite Orbital Deployer" sur la plateforme d'expérimentation polyvalente[12]. |
| 19 novembre 2013 | ArduSat-1 and ArduSat-X sont lancés depuis le Kibo Experiment Module's Exposed Facility, (avec le CubeSat PicoDragon). L'ingénieur de vol Koichi Wakata a utilisé le sas pour sortir le "Multi-Purpose Experiment Platform" de la plateforme Kibo. |
Caractéristiques techniques
ArduSat-1 & ArduSat-X
Le projet ArduSat comprend deux satellites identiques: ArduSat-1 and ArduSat-X.
| Catégorie | Specifications |
|---|---|
| Architecture Générale |
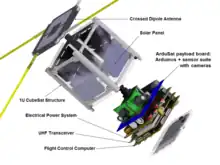
1U CubeSat : Les satellites implémentent l'architecture standard 10×10×10 cm CubeSat. |
| Fonctionnalités | Arduino-based : L'ArduSat est équipé de 16 processeurs (ATmega328P) et 1 microcontrôleur de supervision (ATmega2561) (see [15] for features). Les processeurs sont dédiés aux expérimentations (une pour chaque processeur). Le code est envoyé par les superviseurs. |
| Capteurs |
Les processeurs Arduino peuvent échantillonner les données provenant des capteurs suivants:
|
| Langage |
Les expérimentations sur l'Ardusat sont développées en C/C++ pour AVR/Arduino, utilisant le "ArduSatSDK". |
| Communication | ArduSat est équipé d'un émetteur-récepteur UHF semi-duplex, opérant sur la fréquence 435-438 MHz. |
Références
- (en) Phil Plait, « KickStart your way to an experiment in space », Discover Magazine (consulté le )
- (en) AMSAT, « ArduSat Arduino CubeSat », AMSAT UK (consulté le )
- These events have been recontructed from different posts on the ArduSat KickStarter updates wall
- « SparkFun Box in (Near) SPAAAAACE! », SparkFun (consulté le )
- (en) « Balloons, TVACs, and Shipping –Oh my! » (consulté le )
- (en) « ArduSat Selects NanoRacks for ISS Satellite Deployment », SpaceREF (consulté le )
- (en) « Launch Result of H-II Transfer Vehicle "KOUNOTORI4" (HTV4) by H-IIB Launch Vehicle No. 4 », JAXA (consulté le )
- (en) « Successful berthing of the H-II Transfer Vehicle "KOUNOTORI 4" (HTV4) to the International Space Station (ISS) », JAXA (consulté le )
- « Japanese Cargo Craft Captured, Berthed to Station », NASA (consulté le )
- (en) « HTV-4 Mission payload description », JAXA (consulté le )
- (en) « HTV-4 Mission schedule », JAXA (consulté le )
- (en) « Expedition 38 Wraps Up First Week on Station », NASA (consulté le )
- (en) « Expedition 38 Prepares Japanese Lab for Cubesat Deployment », NASA (consulté le )
- (en) « Crew Deploys Tiny Satellites and Tests Spacesuit Repairs », NASA (consulté le )
- (en) « ArduSat Payload Processor Module », freetronics,