Exemples d'équations différentielles
Cet article présente quelques exemples d'équations différentielles.
Les équations différentielles sont utilisées pour résoudre des problèmes en physique, en ingénierie et dans plusieurs autres sciences.
Équations du premier ordre
Une équation différentielle linéaire à variables séparables
Les équations différentielles les plus simples sont les équations linéaires homogènes du premier ordre. Par exemple, équation différentielle linéaire à variables séparables, de la forme :

où f est une fonction connue admettant des primitives. Une façon directe de la résoudre est de considérer, pour f(t) non nul, la forme avec les variables séparées :

Par intégration, il vient alors :

où A = eC est une constante arbitraire.
Une équation différentielle linéaire à variables non séparables
Le cas plus général inclut des formes où les variables ne sont pas séparables, comme :

où p et q sont des fonctions connues admettant des primitives. Une façon directe de la résoudre est de la réécrire avec un facteur intégrant :

Ce qui donne, en remultipliant par le facteur μ

dont on déduit la forme générale de la solution :

Équations du second ordre
Une oscillation simple non amortie
Les mouvements périodiques dont on néglige les effets de frottement qui vont le ralentir (comme l'allongement du ressort x(t) à un temps t) peuvent être modélisés par l'équation différentielle suivante :
- où ω est un réel positif

Dont les solutions sont :

Pour déterminer les constantes A et B, il faut utiliser les conditions initiales qui permettent de décrire l'état du système à un instant donné (correspondant en général à t = 0).
Par exemple si nous supposons qu'à l'instant t = 0, l'extension du ressort est d'une unité de longueur (x = 1), et la masse est immobile (dx/dt = 0). Nous pouvons en déduire
- ,

d'où l'on déduit A = 1.
- ,

et donc B = 0.
En conséquence est solution de l'équation différentielle étudiée.

Plus souvent en physique pour les oscillations simples non amorties, on utilise une solution de la forme :

avec A étant l'amplitude et ϕ la phase.
Pour l'exemple cité on procède :


Ce qui donne ϕ = 0 et par conséquent A = 1.
D'où le résultat

La solution la plus générale en fonction de conditions initiales quelconques x0 et est donnée par l'équation :


Prise en compte de l'amortissement
Le modèle précédent négligeait les forces de frottement. De ce fait l'oscillation libre pouvait durer indéfiniment, ce qui n'est jamais observé en réalité.
Les frottements sont en général une force proportionnelle à la vitesse (dx/dt) et opposée au mouvement. En rajoutant ce terme notre équation différentielle devient :
- où c > 0 est le coefficient de frottement.

Ceci est une équation différentielle linéaire à coefficients constants, homogène et du second ordre, que nous pouvons résoudre.
En cherchant une solution de la forme particulière A ekt, nous constatons que k doit vérifier l'équation caractéristique suivante :
- .

On revient ainsi à l'étude d'une équation du second degré. Si c < 2ω nous avons deux racines complexes conjuguées (de la forme a ± i b), et la solution (avec les conditions initiales identiques au cas précédent) a la forme suivante :

Nous pouvons démontrer que a < 0.
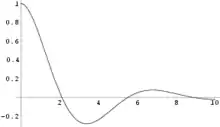
Le système étudié (le pendule pesant dans le référentiel terrestre supposé galiléen) est le siège d'oscillations libres amorties.
Ce sont les positions du centre d'inertie de la masse, en fonction du temps, avec x = 0 correspondant à une position d'équilibre.
NB : la courbe présente une allure proche d'un régime critique : la position d'équilibre est à peine franchie, et on ne compte guère plus d'une pseudo-période d'oscillations.