Commande Skyhook
La commande Skyhook est un modèle de régulation de la position verticale d'un objet fondé sur un amortisseur imaginaire (Skyhook en anglais) auquel l'objet serait suspendu. Elle est principalement utilisée pour la suspension active de véhicules.
Théorie
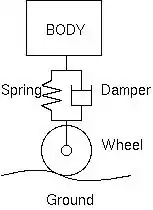
Dans une suspension traditionnelle de type "ressort-amortisseur", la masse est en contact avec le sol par le biais d'un ressort, d'un amortisseur et de la roue, tel que représenté sur la figure 1. L'ensemble des quatre composants est aussi appelé modèle quart-de-véhicule[1]
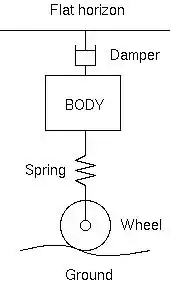
Dans le modèle de commande Skyhook, la masse est en contact avec le sol par le biais du ressort, tandis que l'amortisseur est relié à une base imaginaire au-dessus du quart-de-véhicule, tel que représenté sur la figure 2.
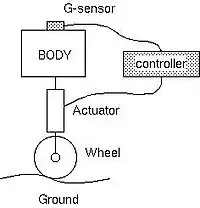
Dans le cas idéalisé où le coefficient de l'amortisseur tend vers l'infini, la masse du véhicule suit une trajectoire strictement parallèle à la ligne imaginaire et les secousses sont complètement éliminées. Bien entendu, cette ligne imaginaire est purement fictive, et c'est par l'actuation du système de suspension active que le véhicule tentera de s'approcher autant que possible du cas idéal. La ligne de référence imaginaire (qui correspond à une accélération verticale nulle) est calculée à partir des mesures d'un accéléromètre installé au sommet du véhicule (figure 3). La suite des calculs de stabilisation est relativement simple, étant donné que le système est constitué des seuls ressort et amortisseur.
Notes et références
- Damien Sammier. Sur la modélisation et la commande de suspension de véhicules automobiles. Automatic. Institut National Polytechnique de Grenoble - INPG, 2001.