Chaîne cinématique (robotique)
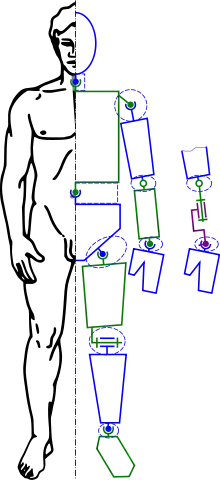
La chaîne cinématique est un modèle mathématique des systèmes mécaniques dans lequel un ensemble de solides indéformables (les "corps" ou "liens" du système) sont connectés entre eux par des articulations[1]. Les articulations d'une chaîne cinématique sont des liaisons mécaniques. Par exemple, dans le modèle du corps humain représenté sur la figure ci-contre, on retrouve par exemple des liaisons pivot (coudes et genoux) ainsi que des liaisons sphériques (chevilles, hanches, cou, épaules et poignets). Elles correspondent mathématiquement à des contraintes holonomes.
Degré de liberté

Le nombre de degrés de liberté d'une chaîne cinématique correspond aux nombres de paramètres nécessaires pour décrire complètement une configuration de la chaîne[2] - [3]. Il est égal à la somme des degrés de liberté de chacune des liaisons de la chaîne.
Un système sans articulation de n solides indéformables en mouvement dans l'espace a 6n degrés de liberté (six par solide : trois pour décrire leur translation et trois pour leur orientation par rapport à un référentiel inertiel). L'ajout d'articulations impose des contraintes au système et réduit par conséquent son nombre de degrés de liberté. Par exemple, l'ajout d'une liaison glissière entre deux solides "consomme" cinq degrés de liberté, ne laissant libre que la distance entre les deux solides selon l'axe de la glissière. Notons c le "degré de contrainte" d'une liaison articulaire, c'est-à-dire le complémentaire de son degré de liberté f : c = 6 - f. Les liaisons pivot et glissière ont ainsi toutes deux un degré de liberté f = 1 et un degré de contrainte c = 5, tandis que la liaison sphérique a un degré de liberté f=3 et de contrainte c=3.
Soit une chaîne cinématique de n corps solides connectés par j articulations. Notons et les degrés de liberté et de contrainte d'une articulation . Le degré de liberté de la chaîne cinématique est alors :




La première formule correspond à la construction du système "par contrainte", telle que décrite dans le paragraphe précédent. La seconde donne une règle de calcul plus rapide. En particulier, pour une chaîne cinématique complètement articulée (c'est-à-dire où tous les corps sont connectés entre eux), on a et le degré de liberté de la chaîne devient simplement :


Voir aussi
Références
- Reuleaux, F., 1876 The Kinematics of Machinery, (trans. and annotated by A. B. W. Kennedy), reprinted by Dover, New York (1963)
- J. M. McCarthy and G. S. Soh, 2010, Geometric Design of Linkages, Springer, New York.
- J. J. Uicker, G. R. Pennock, and J. E. Shigley, 2003, Theory of Machines and Mechanisms, Oxford University Press, New York.